3D 变换#
在这个例子中,我们演示了 3D WarpAffine、旋转和调整大小
Warp 操作符#
所有 warp 操作符都通过在变换后的坐标处采样源图像来计算输出像素
这样,每个输出像素只计算一次。
如果源坐标没有精确指向像素中心,则会根据 interp_type 参数中指定的插值方法,对相邻像素的值进行插值或取最近的像素。
仿射变换#
源采样坐标 \(x_{src}, y_{src}, z_{src}\) 根据以下公式计算
其中 \(x, y\) 是目标像素的坐标,矩阵表示逆向(目标到源)仿射变换。\(\begin{vmatrix} m_{00} & m_{01} & m_{02} \\ m_{10} & m_{11} & m_{12} \\ m_{20} & m_{21} & m_{22} \end{vmatrix}\) 块表示组合的旋转/缩放/剪切变换,\(t_x, t_y, t_z\) 是平移向量。
3D 旋转#
旋转操作符是根据仿射变换实现的,但在内部计算变换矩阵。输出大小会自动调整,大小奇偶性也会进行调整,以减少体积中心附近的模糊。旋转通过指定轴(作为向量)和角度(以度为单位)来定义。
旋转矩阵(源到目标)计算如下
其中 \(u, v, w\) 是归一化的 axis 向量,\(\alpha\) 是从度转换为弧度的 angle。
请注意,内部使用逆矩阵来实现目标到源的映射,这正是操作的实际实现方式。
3D 调整大小#
3D 调整大小与 2D 调整大小大致相同。与 Warp 和 Rotate 不同,Resize 支持更广泛的重采样方法选择,其中许多方法使用抗锯齿。有关 Resize 操作符的详细描述,请参阅 Resize 教程。
用法示例#
首先,让我们导入必要的模块。
[1]:
from nvidia.dali.pipeline import Pipeline
import nvidia.dali.ops as ops
import nvidia.dali.types as types
import nvidia.dali.fn as fn
import numpy as np
import matplotlib.pyplot as plt
import math
import itertools
让我们定义一些体积测试数据和用于显示它的实用程序。
[2]:
import cv2
def centered_scale(in_size, out_size, scale):
tx = (in_size[1] - out_size[1] / scale) / 2
ty = (in_size[0] - out_size[0] / scale) / 2
return np.array([[1 / scale, 0, tx], [0, 1 / scale, ty]])
def project_volume(volume, out_size, eye_z, fovx=90, zstep=0.25):
out_shape = out_size
if len(volume.shape) > 3 and volume.shape[-1] > 1:
out_shape += [volume.shape[-1]]
output = np.zeros(out_shape)
in_size = volume.shape[1:3]
fovx_z = math.tan(math.radians(fovx / 2)) * volume.shape[2] / out_size[1]
def project_slice(volume, plane_z):
plane_index = int(plane_z)
volume_slice = volume[plane_index]
scale = volume_slice.shape[1] / fov_w
M = centered_scale(in_size, out_size, scale)
return cv2.warpAffine(
volume_slice,
M,
dsize=(out_size[1], out_size[0]),
flags=cv2.WARP_INVERSE_MAP + cv2.INTER_LINEAR,
)
for plane_z in np.arange(0, volume.shape[0], zstep):
z = plane_z - eye_z
fov_w = z * fovx_z
z0 = np.clip(math.floor(plane_z), 0, volume.shape[0] - 1)
z1 = np.clip(math.ceil(plane_z), 0, volume.shape[0] - 1)
projected_slice = project_slice(volume, z0)
# trilinear interpolation
if z1 != z0:
slice1 = project_slice(volume, z1)
q = plane_z - np.floor(plane_z)
projected_slice = (projected_slice * (1 - q) + slice1 * q).astype(
np.uint8
)
output += projected_slice
return output
def perspective(volume, max_size):
window_size = 300
(h, w) = volume.shape[1:3]
if h > w:
w = window_size * w // h
h = window_size
else:
h = window_size * h // w
w = window_size
return project_volume(volume, [h, w], -volume.shape[2]) * (1 / 255.0)
import matplotlib.gridspec as gridspec
def draw_volume(volume, title):
captions = [
"XY middle slice",
"ZY middle slice",
"XZ middle slice",
"perspective",
]
shape = volume.shape
persp = perspective(volume, 300)
persp *= 1.0 / persp.max()
persp = persp.clip(0, 1)
axes = (1, 0, 2) if len(shape) > 3 else (1, 0)
images = [
volume[shape[0] // 2, :, :],
volume[:, :, shape[2] // 2].transpose(axes),
volume[:, shape[1] // 2, :],
persp,
]
for i in range(len(images)):
if len(images[i].shape) == 3 and images[i].shape[2] == 1:
images[i] = images[i][:, :, 0]
fig = plt.figure(figsize=(16, 18))
plt.suptitle(title, fontsize=18)
columns = 2
rows = int(math.ceil(len(images) / columns))
gs = gridspec.GridSpec(rows, columns)
for i in range(len(images)):
plt.subplot(gs[i])
plt.axis("off")
plt.title(captions[i])
plt.imshow(images[i], origin="lower")
[3]:
import os
test_data_root = os.environ["DALI_EXTRA_PATH"]
base_dir = os.path.join(
test_data_root, "db", "3D", "MRI", "Knee", "Jpegs", "STU00001"
)
def LoadData(dir):
imgs = []
i = 0
path = os.path.join(base_dir, dir, "%i.jpg")
while True:
img = cv2.imread(path % i, cv2.IMREAD_GRAYSCALE)
if img is None:
break
i += 1
imgs.append(img[::-1, :, np.newaxis])
a = (np.stack(imgs, axis=0) / 255).astype(np.float32)
return a
def GetData():
return [LoadData("SER00008")]
现在,让我们定义 pipeline。变换参数是硬编码的,但轴、角度和矩阵参数可以指定为 CPU 张量。warp 矩阵也可以作为常规输入传递给 WarpAffine 操作符,在这种情况下,它们可以作为 GPU 张量传递。有关确切用法,请参阅 Warp 示例。
[4]:
pipe = Pipeline(
batch_size=1,
num_threads=3,
device_id=0,
exec_pipelined=True,
exec_async=True,
)
with pipe:
data = fn.external_source(
source=GetData, device="gpu", layout="DHWC", dtype=types.FLOAT
)
# scale only Z axis
resized = fn.resize(
data, resize_z=224, mode="stretch", interp_type=types.INTERP_LANCZOS3
)
angle = fn.random.uniform(range=(-20, 20), seed=123)
axis = fn.random.uniform(range=(-1, 1), shape=[3])
rotated = fn.rotate(
resized,
angle=angle,
axis=axis,
interp_type=types.INTERP_LINEAR,
fill_value=0, # force out-of-bounds pixels to 0
)
warped = fn.warp_affine(
resized,
size=(200, 320, 320),
matrix=(1, 1, 0, -180, 0, 1, 0.2, -20, 0, 0, 1, 10),
interp_type=types.INTERP_LINEAR,
fill_value=0, # force out-of-bounds pixels to 0
)
pipe.set_outputs(data, resized, rotated, warped, axis, angle)
pipe.build()
最后,我们可以运行 pipeline 以获得预处理的体积。
[5]:
pipe_out = pipe.run()
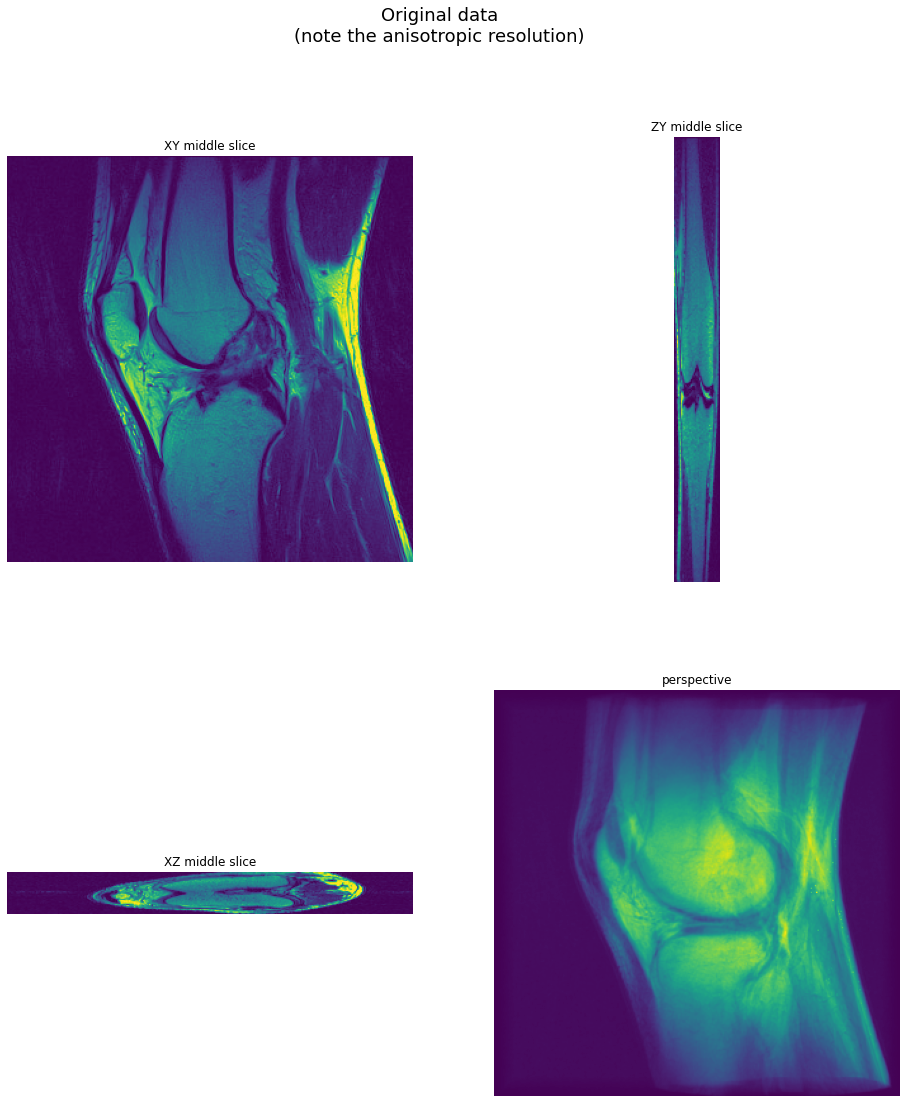
示例输出#
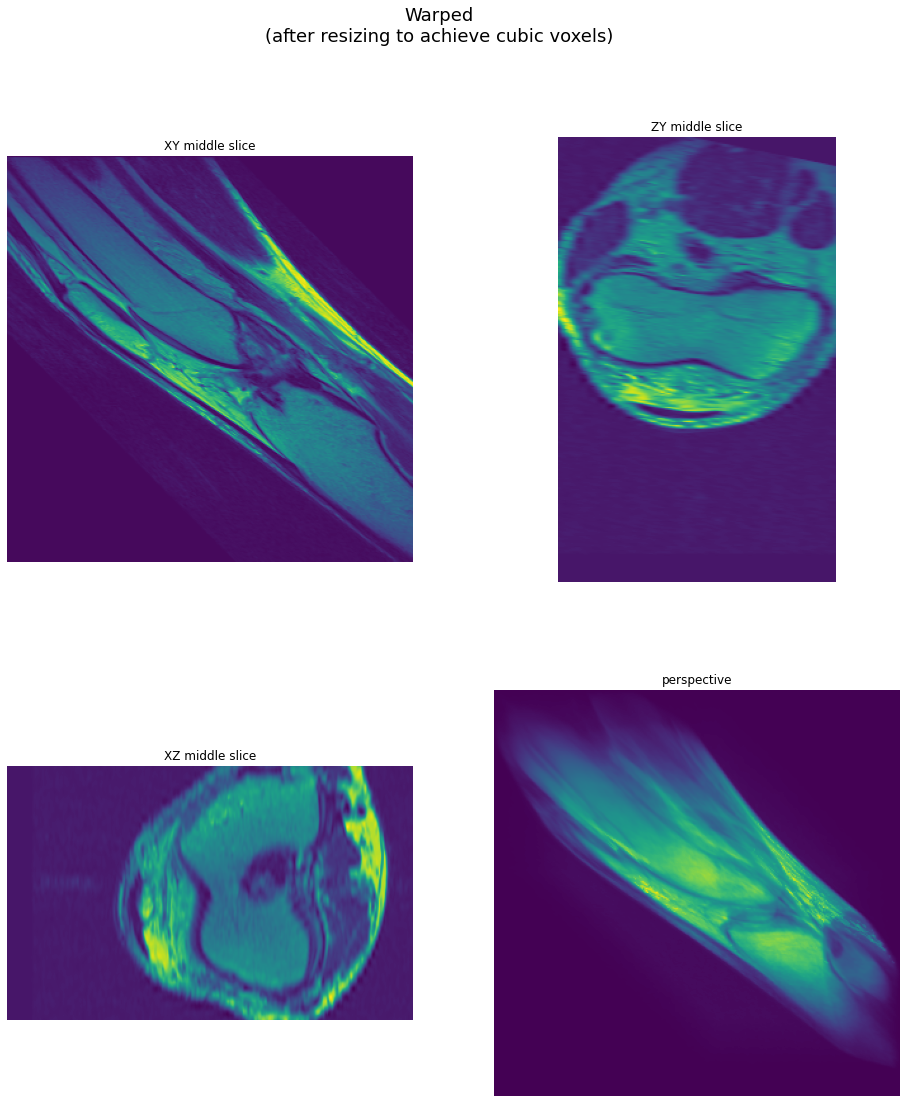
输出显示为三个中间切片(XY、ZY 和 XZ)和一个透视投影。透视投影是通过沿像素对应的射线积分强度获得的。
[6]:
draw_volume(
pipe_out[0].as_cpu().at(0),
"Original data\n(note the anisotropic resolution)",
)
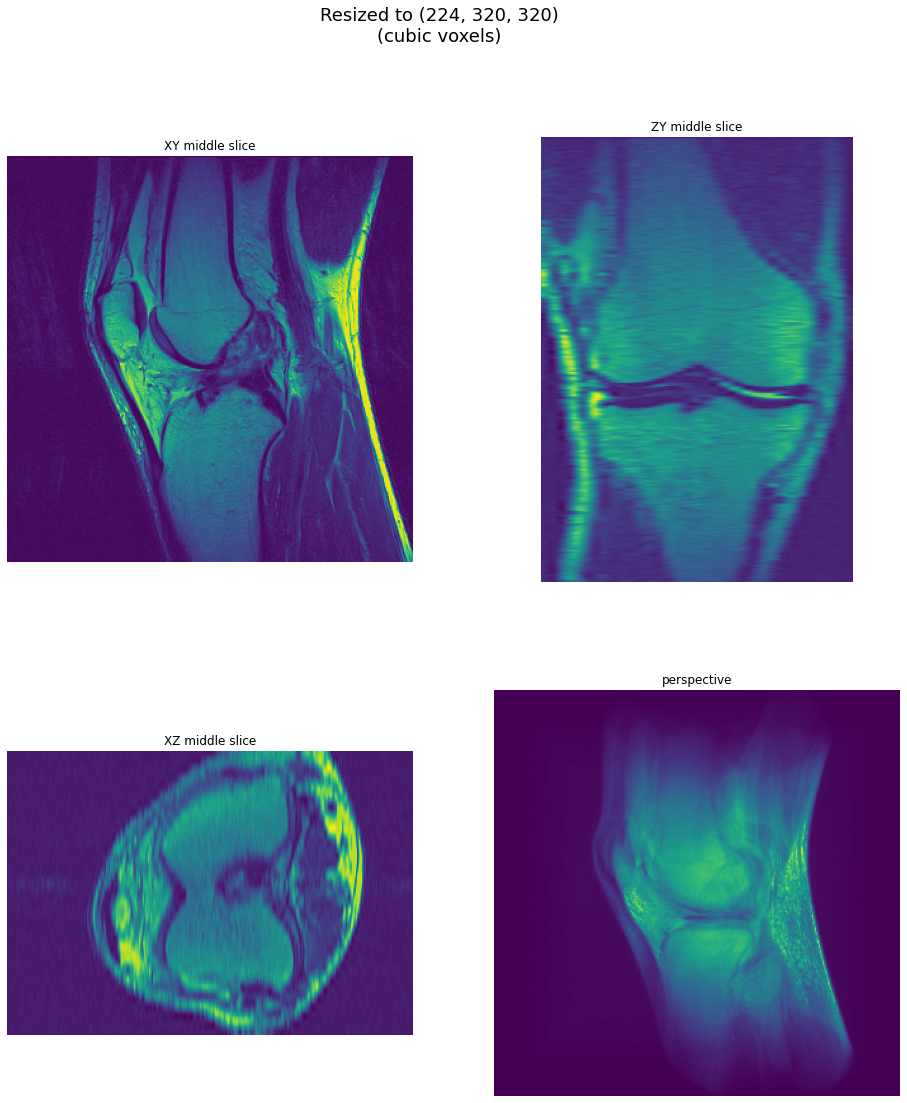
结果:调整大小#
每个切片的分辨率远高于切片之间的分辨率 - 让我们看看调整大小以实现立方体素后的数据。
[7]:
vol = pipe_out[1].as_cpu().at(0)
draw_volume(vol, "Resized to {}\n(cubic voxels)".format(vol.shape[:-1]))
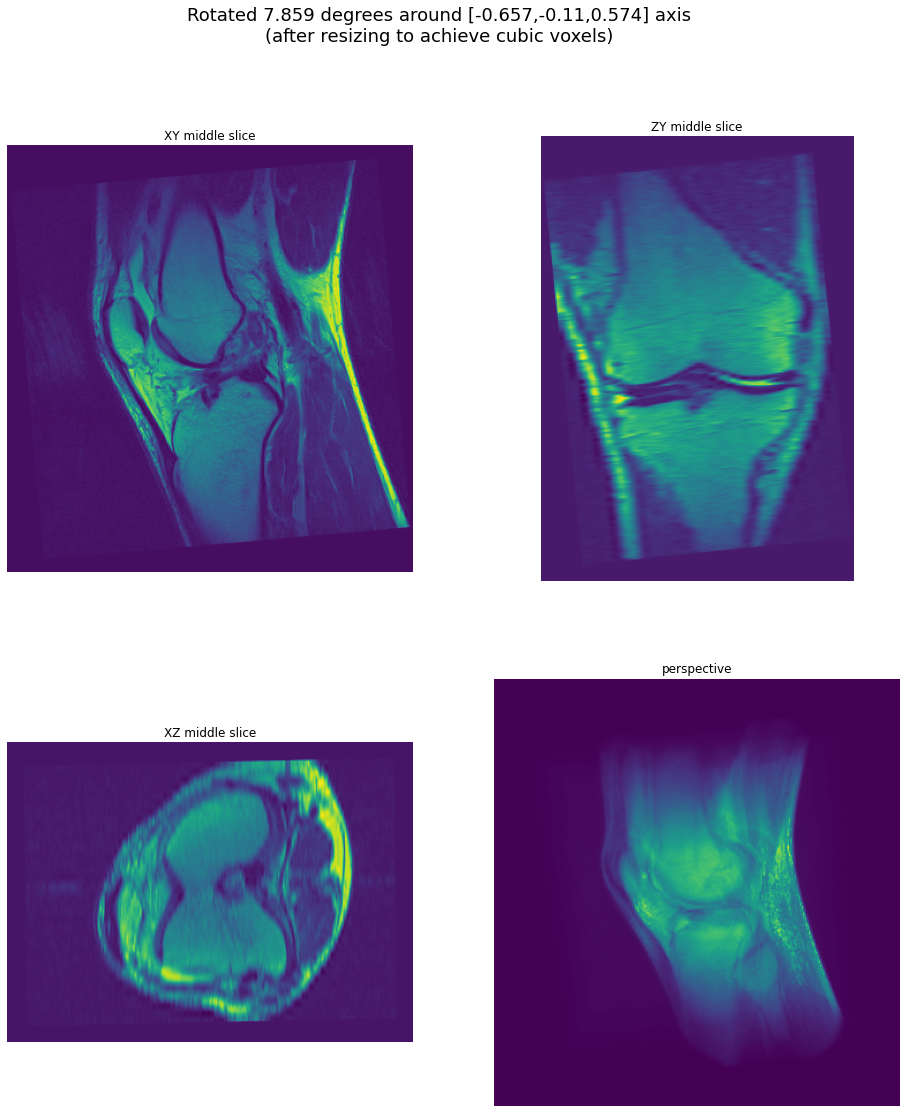
结果:旋转#
现在让我们看看旋转后的体积 - 在调整大小以实现立方体素之后。
[8]:
angle = pipe_out[-1].at(0)
axis = pipe_out[-2].at(0).tolist()
draw_volume(
pipe_out[2].as_cpu().at(0),
"Rotated {:.3f} degrees around [{:.3},{:.3},{:.3}] axis".format(
angle, axis[0], axis[1], axis[2]
)
+ "\n(after resizing to achieve cubic voxels)",
)
结果:WarpAffine#
最后,让我们看看应用仿射变换的结果。
[9]:
draw_volume(
pipe_out[3].as_cpu().at(0),
"Warped\n(after resizing to achieve cubic voxels)",
)