在输入图像上运行 ORB 算法以检测特征并提取描述符。 更多...
数据结构 | |
| struct | VPIORBParams |
| 定义 vpiSubmitORBFeatureDetector 参数的结构体。 更多... | |
宏 | |
| #define | VPI_DISABLE_RBRIEF (0x01) |
| 在 ORB 中使用非旋转不变 BRIEF。 | |
函数 | |
| VPIStatus | vpiInitORBParams (VPIORBParams *params) |
| 使用默认值初始化 VPIORBParams。 更多... | |
| VPIStatus | vpiCreateORBFeatureDetector (uint64_t backends, int32_t capacity, VPIPayload *payload) |
| 创建一个 ORB 特征检测器 负载。 更多... | |
| VPIStatus | vpiSubmitORBFeatureDetector (VPIStream stream, uint64_t backend, VPIPayload payload, VPIPyramid input, VPIArray outCorners, VPIArray outDescriptors, const VPIORBParams *params, VPIBorderExtension border) |
| 将 ORB 特征检测器 操作提交到流。 更多... | |
| VPIStatus | vpiCreateORBDescriptorExtractor (uint64_t backends, VPIPayload *payload) |
| 创建一个 ORB 描述符提取器 负载。 更多... | |
| VPIStatus | vpiSubmitORBDescriptorExtractor (VPIStream stream, uint64_t backend, VPIPayload payload, VPIPyramid input, VPIArray inCorners, VPIArray outDescriptors, uint32_t flags) |
| 将 ORB 描述符提取器 操作提交到流。 更多... | |
详细描述
在输入图像上运行 ORB 算法以检测特征并提取描述符。
有关更多详细信息和使用示例,请参阅 ORB 特征检测器。
数据结构文档
◆ VPIORBParams
| struct VPIORBParams |
定义 vpiSubmitORBFeatureDetector 参数的结构体。
 VPIORBParams 的协作图
VPIORBParams 的协作图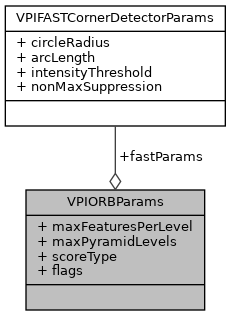
| 数据字段 | ||
|---|---|---|
| VPIFASTCornerDetectorParams | fastParams | FAST 角点检测器的参数,有关更多详细信息,请参阅 FAST 角点检测器。 ORB 使用 FAST 算法来检测输入金字塔每层的角点或特征。 |
| int32_t | maxFeaturesPerLevel | ORB 每层输入金字塔要使用的最大特征数 N。 在过滤前 N 个最佳角点之前,FAST 算法可能会在每层找到大量 C 个角点。数字 C 是创建 ORB 负载函数的容量输入参数:vpiCreateORBFeatureDetector。所有级别的最大特征数由作为参数传递给 submit ORB 函数的输出数组的容量定义:vpiSubmitORBFeatureDetector。过滤取决于 VPIORBParams::scoreType 参数。
|
| int32_t | maxPyramidLevels | 要利用的输入金字塔中的最大层数。 |
| VPICornerScore | scoreType | 分数类型允许定义如何为角点分配分数。 角点性分数用于对 FAST 检测到的所有角点从最高分值到最低分值进行排序。在分数分配之后,ORB 会过滤前 N 个最佳角点,其中 N 由参数确定:VPIORBParams::maxFeaturesPerLevel。使用 VPI_CORNER_SCORE_HARRIS 以根据 Harris 响应分数分配角点性分数。使用 VPI_CORNER_SCORE_FAST 以跳过角点性分数分配和排序。通过使用 FAST 分数类型,ORB 的性能得到提高,但输出特征的质量会降低。 |
| uint32_t | flags | 控制标志。
|
函数文档
◆ vpiInitORBParams()
| VPIStatus vpiInitORBParams | ( | VPIORBParams * | params | ) |
#include <vpi/algo/ORB.h>
使用默认值初始化 VPIORBParams。
默认值为
- params.fastParams 请参阅 vpiInitFASTCornerDetectorParams
- params.maxFeaturesPerLevel: 100
- params.maxPyramidLevels: 4
- params.scoreType: VPI_CORNER_SCORE_HARRIS;
- params.flags: 0
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT params为 NULL。VPI_SUCCESS 操作执行成功。
◆ vpiCreateORBFeatureDetector()
| VPIStatus vpiCreateORBFeatureDetector | ( | uint64_t | backends, |
| int32_t | capacity, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/ORB.h>
创建一个 ORB 特征检测器 负载。
此函数分配算法所需的所有临时内存。
- 参数
-
[in] backends 有资格执行该算法的 VPI 后端。 - 有效值
- 后端必须在当前上下文中启用。
[in] capacity 用于存储每个输入金字塔级别的 FAST 角点和分数的内部缓冲区的容量。它决定了在 ORB 过滤之前 FAST 检测到的每层最大特征数。ORB 算法为这些特征分配分数,参见 VPIORBParams::scoreType,并对其进行排序以过滤前 N 个最佳特征,其中 N 是 VPIORBParams::maxFeaturesPerLevel 参数。 [out] payload 指向接收创建句柄的负载变量的指针。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT payload为 NULL。VPI_ERROR_INVALID_ARGUMENT backends引用了无效的后端。VPI_ERROR_INVALID_OPERATION 后端硬件不可用。 VPI_ERROR_NOT_IMPLEMENTED 给定后端不支持 ORB 算法。 VPI_ERROR_INVALID_CONTEXT 当前上下文已销毁。 VPI_ERROR_OUT_OF_MEMORY 无法分配所需资源。 VPI_ERROR_INVALID_OPERATION 后端在当前上下文中未启用。 VPI_SUCCESS 操作执行成功。
◆ vpiSubmitORBFeatureDetector()
| VPIStatus vpiSubmitORBFeatureDetector | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| VPIPyramid | input, | ||
| VPIArray | outCorners, | ||
| VPIArray | outDescriptors, | ||
| const VPIORBParams * | params, | ||
| VPIBorderExtension | border | ||
| ) |
#include <vpi/algo/ORB.h>
将 ORB 特征检测器 操作提交到流。
- 注意
- 此操作同时检测特征并提取描述符。如果只需要特征检测,请使用此操作并将 NULL 传递给描述符输出数组以使其被忽略。
- 参数
-
[in] stream 操作将排队的流。 - 不得为 NULL。
- 流必须启用将执行该算法的后端。
[in] backend 将执行该算法的后端。 [in] payload 要与其他参数一起提交的负载。 [in] input 输入 要在其上执行 ORB 的输入金字塔。 - 不得为 NULL。
- 金字塔必须启用将执行该算法的后端。
- 输入金字塔的比例必须为 0.5。
- 接受的图像格式为
[out] outCorners 将接收检测到的角点的数组。数组大小根据找到的角点数量更新。数组容量定义了所有级别要找到的最大角点数。所有级别中可能的最大特征数 F 定义为 VPIORBParams.maxFeaturesPerLevel乘以级别数。- 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_PYRAMIDAL_KEYPOINT_F32 类型(请参阅注意)。
- 如果小于 F(见上文),则它必须与 outDescriptors 具有相同的容量。
- 数组必须启用将执行该算法的后端。
[out] outDescriptors 将接收角点描述符的数组。数组大小根据找到的角点数量更新。数组容量定义了所有级别要找到的最大描述符数。所有级别中可能的最大特征数 F 定义为 VPIORBParams.maxFeaturesPerLevel乘以级别数。- 它可以为 NULL 以仅进行特征检测。
- 它必须具有 VPI_ARRAY_TYPE_BRIEF_DESCRIPTOR 类型。
- 如果小于 F(见上文),则它必须与 outCorners 具有相同的容量。
- 数组必须启用将执行该算法的后端。
[in] params 指向 VPIORBParams 的指针。它定义了此算法调用的参数。这些参数在每次调用中都可能不同,并将内部复制。因此,无需保留参数对象。 - 如果为 NULL,则使用 vpiInitORBParams 给出的默认值。
[in] border 如何处理图像边界外的像素。它影响每个级别的 FAST 角点检测,参考 FAST 角点检测器。 - 接受的边界扩展为
- 注意
- 为了向后兼容 VPI 3.0,VPI_ARRAY_TYPE_KEYPOINT_F32 也作为
outCorners参数的数组类型受支持。使用 VPI 3.0 传统 ORB 行为,关键点坐标缩放到第一金字塔级别的分辨率,描述符在金字塔的第一张图像中计算。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT stream为 NULL。VPI_ERROR_INVALID_ARGUMENT input或outCorners或outDescriptors为 NULL。VPI_ERROR_INVALID_ARGUMENT backend无效或未知。VPI_ERROR_INVALID_ARGUMENT params中的参数超出有效范围。VPI_ERROR_INVALID_ARRAY_TYPE 无效的 outCorners或outDescriptors数组类型。VPI_ERROR_INVALID_IMAGE_FORMAT 不支持的输入格式。 VPI_ERROR_INVALID_OPERATION 所需的后端在 stream或input中未启用。VPI_ERROR_INVALID_OPERATION 所需的后端在 outCorners或outDescriptors中未启用。VPI_SUCCESS 操作执行成功。
◆ vpiCreateORBDescriptorExtractor()
| VPIStatus vpiCreateORBDescriptorExtractor | ( | uint64_t | backends, |
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/ORB.h>
创建一个 ORB 描述符提取器 负载。
此函数分配算法所需的所有临时内存。
- 参数
-
[in] backends 有资格执行该算法的 VPI 后端。 - 有效值
- 后端必须在当前上下文中启用。
[out] payload 指向接收创建句柄的负载变量的指针。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT payload为 NULL。VPI_ERROR_INVALID_ARGUMENT backends引用了无效的后端。VPI_ERROR_INVALID_OPERATION 后端硬件不可用。 VPI_ERROR_NOT_IMPLEMENTED 给定后端不支持 ORB 算法。 VPI_ERROR_INVALID_CONTEXT 当前上下文已销毁。 VPI_ERROR_OUT_OF_MEMORY 无法分配所需资源。 VPI_ERROR_INVALID_OPERATION 后端在当前上下文中未启用。 VPI_SUCCESS 操作执行成功。
◆ vpiSubmitORBDescriptorExtractor()
| VPIStatus vpiSubmitORBDescriptorExtractor | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| VPIPyramid | input, | ||
| VPIArray | inCorners, | ||
| VPIArray | outDescriptors, | ||
| uint32_t | flags | ||
| ) |
#include <vpi/algo/ORB.h>
将 ORB 描述符提取器 操作提交到流。
- 注意
- 仅在需要解耦 ORB 特征检测和提取的情况下,此操作才有用。对于同时执行检测和提取的情况,请改用 vpiSubmitORBFeatureDetector。
- 参数
-
[in] stream 操作将排队的流。 - 不得为 NULL。
- 流必须启用将执行该算法的后端。
[in] backend 将执行该算法的后端。 [in] payload 为将来使用保留的负载。它可以为 NULL。 [in] input 输入 要在其上执行 ORB 描述符提取器的输入。 - 不得为 NULL。
- 输入必须启用将执行该算法的后端。
- 输入必须是 VPIPyramid(请参阅注意)。
- 输入金字塔的比例必须为 0.5。
- 接受的图像格式为
- 使用 VPI_BACKEND_PVA
- 不支持有符号的图像格式。
- 每个金字塔级别的分辨率必须大于 45x45
[in] inCorners 包含要从中计算描述符的角点的数组。此数组中的每个项目(即一个角点)用于计算输出数组中的一个项目(即相应角点的描述符)。此输入数组的大小决定了要从中提取描述符的角点数。 - 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_PYRAMIDAL_KEYPOINT_F32 类型(请参阅注意)。
- 数组必须启用将执行该算法的后端。
- 使用 VPI_BACKEND_PVA
- VPIPyramidalKeypointF32::layer 被忽略,并且描述符的计算方式始终好像 layer == 0。
[out] outDescriptors 将接收角点描述符的数组。此输出数组中的每个位置都对应于输入数组中相同位置的角点描述符。输出数组容量定义了要提取的最大描述符数。输出数组容量必须大于输入数组的大小,才能为所有角点提取描述符。 - 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_BRIEF_DESCRIPTOR 类型。
- 数组必须启用将执行该算法的后端。
- 使用 VPI_BACKEND_PVA
- 由 PVA 生成的描述符通常与由其他后端生成的描述符不兼容。
[in] flags 控制标志。 - 有效值是以下一个或多个标志的组合
- 0:默认值,所有其他标志的否定。
- VPI_DISABLE_RBRIEF:禁用旋转不变 BRIEF
- 注意
- 为了向后兼容 VPI 3.0,提供了一种替代 API 签名,其中
input必须是 VPIImage,并且inCorners必须具有 VPI_ARRAY_TYPE_KEYPOINT_F32 类型。要选择 VPI 3.0 接口,请在包含 ORB.h 头文件之前,将 NV_VPI_VERSION_API 定义为 NV_VPI_MAKE_VERSION(3,0)。PVA 后端仅支持 API 级别 3.1 及更高版本,同时使用 VPI 库版本 3.2 及更高版本。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT stream或input或inCorners或outDescriptors为 NULL。VPI_ERROR_INVALID_ARGUMENT backend无效或未知。VPI_ERROR_INVALID_ARRAY_TYPE 无效的 inCorners或outDescriptors数组类型。VPI_ERROR_INVALID_IMAGE_FORMAT 不支持的输入格式。 VPI_ERROR_INVALID_OPERATION 所需的后端在 stream或input中未启用。VPI_ERROR_INVALID_OPERATION 所需的后端在 inCorners或outDescriptors中未启用。VPI_SUCCESS 操作执行成功。