定义了多个组件使用的通用类型。 更多...
数据结构 | |
| struct | VPIPyramidalKeypointF32 |
| 存储基于 float32 金字塔的关键点坐标。坐标包括金字塔内图像中的 (x, y) 位置,以及用于选择该金字塔上特定图像的(八度和层)。 更多... | |
| struct | VPIKeypointF32 |
| 存储 float32 关键点坐标。坐标相对于图像的左上角。 更多... | |
| struct | VPIKeypointU32 |
| 存储 U32 关键点坐标。坐标相对于图像的左上角。 更多... | |
| struct | VPIHomographyTransform2D |
| 存储通用的 2D 单应性变换。 更多... | |
| struct | VPIBoundingBox |
| 存储通用的 2D 边界框。 更多... | |
| struct | VPIAxisAlignedBoundingBoxF32 |
| 存储轴对齐的 32 位浮点 2D 边界框。 更多... | |
| struct | VPIStats |
| 存储图像的统计信息。 更多... | |
| struct | VPIMatches |
| 存储 2 个描述符之间的匹配项。 更多... | |
| struct | VPIRectangleI |
| 存储矩形的几何信息。 更多... | |
| struct | VPIPose |
| 估计从一个 3D 坐标系到另一个 3D 坐标系的变换,并带有对象空间误差。 更多... | |
宏 | |
| #define | VPI_TERMINATION_CRITERIA_ITERATIONS (1u << 0) |
| 定义了终止条件宏。 更多... | |
枚举 | |
| enum | VPIInterpolationType |
| 多个算法支持的插值类型。 更多... | |
| enum | VPIBorderExtension |
| 图像边界扩展指定应如何构建图像域外部的像素值。 更多... | |
| enum | VPIOpticalFlowQuality |
| 定义了光流算法的质量。 更多... | |
| enum | VPILockMode |
| 定义了内存锁定函数使用的锁定模式。 更多... | |
| enum | VPIEventState |
| 定义了事件的状态。 更多... | |
详细描述
定义了多个组件使用的通用类型。
数据结构文档
◆ VPIPyramidalKeypointF32
| struct VPIPyramidalKeypointF32 |
存储基于 float32 金字塔的关键点坐标。坐标包括金字塔内图像中的 (x, y) 位置,以及用于选择该金字塔上特定图像的(八度和层)。
金字塔用于用一个或多个分辨率级别(也称为八度)来近似尺度空间,其中每个八度可以有一个或多个平滑层。一个例子是在 ORB 算法 中,其输入是一个金字塔,表示其基础图像的尺度空间,通常有几个八度,其中每个八度有一层。八度定义为双图像金字塔的级别,即比例为 0.5 的 VPIPyramid 。
 VPIPyramidalKeypointF32 的协作图
VPIPyramidalKeypointF32 的协作图
| 数据字段 | ||
|---|---|---|
| float | x | 关键点的 x 坐标。 |
| float | y | 关键点的 y 坐标。 |
| float | octave | 关键点所在的金字塔八度(或金字塔级别)。 |
| float | layer | 关键点所在的八度内的金字塔层。 |
◆ VPIKeypointF32
| struct VPIKeypointF32 |
◆ VPIKeypointU32
| struct VPIKeypointU32 |
◆ VPIHomographyTransform2D
| struct VPIHomographyTransform2D |
存储通用的 2D 单应性变换。
当只需要缩放和平移变换时,这些参数必须按如下方式排列在矩阵中
\[ \begin{bmatrix} s_x & 0 & p_x \\ 0 & s_y & p_y \\ 0 & 0 & 1 \end{bmatrix} \]
缩放 \((s_x,s_y)\) 相对于图像块的中心,位置 \((p_x,p_y)\) 相对于图像的左上角。
在一般情况下,给定一个齐次 2D 点 \(P(x,y,1)\) 和矩阵 \(M^{3x3}\),欧几里得 2D 点 \(O(x,y)\) 定义为
\begin{align} T &= M \cdot P \\ O &= (T_x/T_z, T_y/T_z) \end{align}
VPIHomographyTransform2D 的协作图
| 数据字段 | ||
|---|---|---|
| float | mat3[3][3] | 定义单应性的 3x3 齐次矩阵。 |
◆ VPIBoundingBox
| struct VPIBoundingBox |
存储通用的 2D 边界框。
尽管此结构可以存储由任何单应性变换的 2D 边界框,但有时它存储轴对齐的边界框。要检索它,请执行以下操作
VPIBoundingBox 的协作图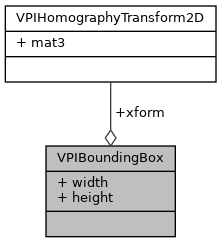
| 数据字段 | ||
|---|---|---|
| VPIHomographyTransform2D | xform | 定义边界框左上角及其单应性。 |
| float | width | 边界框宽度。 |
| float | height | 边界框高度。 |
◆ VPIAxisAlignedBoundingBoxF32
| struct VPIAxisAlignedBoundingBoxF32 |
◆ VPIStats
| struct VPIStats |
◆ VPIMatches
| struct VPIMatches |
VPIMatches 的协作图
| 数据字段 | ||
|---|---|---|
| int | refIndex[VPI_MAX_MATCHES_PER_DESCRIPTOR] | 匹配参考索引。 |
| float | distance[VPI_MAX_MATCHES_PER_DESCRIPTOR] | 查询描述符和参考描述符之间的距离。 |
◆ VPIRectangleI
| struct VPIRectangleI |
◆ VPIPose
| struct VPIPose |
VPIPose 的协作图
宏定义文档
◆ VPI_TERMINATION_CRITERIA_ITERATIONS
| #define VPI_TERMINATION_CRITERIA_ITERATIONS (1u << 0) |
枚举类型文档
◆ VPIInterpolationType
| enum VPIInterpolationType |
#include <vpi/Interpolation.h>
多个算法支持的插值类型。
定义在文件 Interpolation.h 的 Interpolation.h 69 行。
◆ VPIBorderExtension
| enum VPIBorderExtension |
#include <vpi/Types.h>
图像边界扩展指定应如何构建图像域外部的像素值。
| 枚举器 | |
|---|---|
| VPI_BORDER_ZERO | 图像外部的所有像素均被视为零。 |
| VPI_BORDER_CLAMP | 边界像素无限重复。 |
| VPI_BORDER_REFLECT | edcba|abcde|edcba |
| VPI_BORDER_MIRROR | dedcb|abcde|dcbab |
| VPI_BORDER_LIMITED | 将图像视为受限,不访问外部像素。 |
| VPI_BORDER_INVALID | 无效边界。 |
◆ VPIOpticalFlowQuality
#include <vpi/Types.h>
定义了光流算法的质量。
| 枚举器 | |
|---|---|
| VPI_OPTICAL_FLOW_QUALITY_LOW | 快速但低质量的光流实现。 |
| VPI_OPTICAL_FLOW_QUALITY_MEDIUM | 速度和质量介于 VPI_OPTICAL_FLOW_QUALITY_LOW 和 VPI_OPTICAL_FLOW_QUALITY_HIGH 之间。 |
| VPI_OPTICAL_FLOW_QUALITY_HIGH | 慢速但高质量的光流实现。 |
◆ VPILockMode
| enum VPILockMode |
#include <vpi/Types.h>
定义了内存锁定函数使用的锁定模式。
◆ VPIEventState
| enum VPIEventState |
#include <vpi/Types.h>
定义了事件的状态。
| 枚举器 | |
|---|---|
| VPI_EVENT_STATE_NOT_SIGNALED | 事件尚未发出信号。 |
| VPI_EVENT_STATE_SIGNALED | 事件已发出信号。 |