定义了使用 VPI 编程所需的所有类型。 更多...
#include "ImageFormat.h"#include "Interpolation.h"#include "PixelType.h"#include "Status.h"#include "Version.h"#include <stdint.h> Types.h 的包含依赖关系图
Types.h 的包含依赖关系图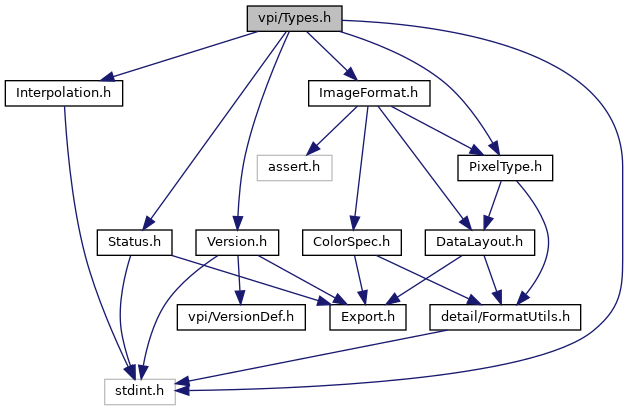 此图显示哪些文件直接或间接地包含此文件
此图显示哪些文件直接或间接地包含此文件
数据结构 | |
| struct | VPIParallelForConfig |
| 存储 ParallelFor 配置。 更多... | |
| struct | VPIPyramidalKeypointF32 |
| 存储基于浮点数 32 位的金字塔关键点坐标。该坐标包括金字塔内图像中的 (x, y) 位置,以及(八度和层)选择该金字塔上的特定图像。 更多... | |
| struct | VPIKeypointF32 |
| 存储浮点数 32 位的关键点坐标。该坐标相对于图像的左上角。 更多... | |
| struct | VPIKeypointU32 |
| 存储 U32 关键点坐标。该坐标相对于图像的左上角。 更多... | |
| struct | VPIBriefDescriptor |
| 存储 BRIEF 描述符。 更多... | |
| struct | VPIHomographyTransform2D |
| 存储通用 2D 单应性变换。 更多... | |
| struct | VPIBoundingBox |
| 存储通用 2D 边界框。 更多... | |
| struct | VPIAxisAlignedBoundingBoxF32 |
| 存储轴对齐的 32 位浮点数 2D 边界框。 更多... | |
| struct | VPIKLTTrackedBoundingBox |
| 存储正在被 KLT 跟踪器 跟踪的边界框。 更多... | |
| struct | VPIDCFTrackedBoundingBox |
| 存储关于被 DCF 跟踪器 跟踪的对象的信息。 更多... | |
| struct | VPIStats |
| 存储图像的统计信息。 更多... | |
| struct | VPIMatches |
| 存储 2 个描述符之间的匹配项。 更多... | |
| struct | VPIRectangleI |
| 存储矩形的几何信息。 更多... | |
| struct | VPIAprilTagDetection |
| 存储来自 AprilTag 检测器 的 AprilTag 检测信息。 更多... | |
| struct | VPIPose |
| 估计从一个 3D 坐标系到另一个 3D 坐标系的变换,并带有对象空间误差。 更多... | |
宏 | |
| #define | VPI_BRIEF_DESCRIPTOR_ARRAY_LENGTH 32 |
| Brief 描述符数组的长度。 | |
| #define | VPI_BRIEF_DESCRIPTOR_BIT_WIDTH (VPI_BRIEF_DESCRIPTOR_ARRAY_LENGTH * 8) |
| Brief 描述符的位长度。 | |
| #define | VPI_MAX_MATCHES_PER_DESCRIPTOR (3) |
| 每个描述符的最大匹配数。 | |
| #define | VPI_TERMINATION_CRITERIA_ITERATIONS (1u << 0) |
| 定义终止条件宏。 更多... | |
| #define | VPI_TERMINATION_CRITERIA_EPSILON (1u << 1) |
| 基于最大误差 (epsilon) 的终止。 | |
| #define | VPI_STAT_PIXEL_COUNT (1U << 0) |
| 定义要计算的统计信息。 更多... | |
| #define | VPI_STAT_SUM (1U << 1) |
| 计算每通道总和。 | |
| #define | VPI_STAT_MEAN ((1U << 2) | VPI_STAT_SUM | VPI_STAT_PIXEL_COUNT) |
| 计算每通道均值。 | |
| #define | VPI_STAT_VARIANCE ((1U << 3) | VPI_STAT_MEAN) |
| 计算协方差矩阵,其中包含每个通道的方差。 | |
| #define | VPI_STAT_COVARIANCE ((1U << 4) | VPI_STAT_VARIANCE) |
| 计算完整的协方差矩阵。 | |
通用对象标志。 | |
它们可能会更改已创建对象的一些特性,以符合某些预期行为。 | |
| #define | VPI_EXCLUSIVE_STREAM_ACCESS (1ULL << 16) |
| 指定内存将一次仅由一个流访问。 更多... | |
| #define | VPI_RESTRICT_MEM_USAGE (1ULL << 17) |
| 限制内存资源使用量的标志。 更多... | |
| #define | VPI_REQUIRE_BACKENDS (1ULL << 18) |
| 要求创建请求的后端。 更多... | |
类型定义 | |
| typedef void(* | VPIParallelTask) (int taskId, int threadId, void *vpiData) |
| 并行任务函数指针类型。 | |
| typedef void(* | VPIParallelForCallback) (VPIParallelTask task, int taskCount, void *vpiData, void *userData) |
| 并行 for 回调函数指针类型。 更多... | |
| typedef void * | VPINativeThreadHandle |
| 操作系统特定线程句柄的句柄。 | |
| typedef struct VPIArrayImpl * | VPIArray |
| 数组的句柄。 | |
| typedef struct VPIContextImpl * | VPIContext |
| 上下文的句柄。 | |
| typedef struct VPIEventImpl * | VPIEvent |
| 事件的句柄。 | |
| typedef struct VPIStreamImpl * | VPIStream |
| 流的句柄。 | |
| typedef struct VPIImageImpl * | VPIImage |
| 图像的句柄。 | |
| typedef struct VPIPyramidImpl * | VPIPyramid |
| 图像金字塔的句柄。 | |
| typedef struct VPIPayloadImpl * | VPIPayload |
| 算法负载的句柄。 | |
| typedef float | VPICameraIntrinsic[2][3] |
| 相机内参矩阵。 更多... | |
| typedef float | VPICameraExtrinsic[3][4] |
| 相机外参矩阵。 更多... | |
| typedef float | VPIPerspectiveTransform[3][3] |
| 表示 2D 透视变换。 更多... | |
枚举 | |
| enum | VPIBorderExtension |
| 图像边界扩展指定应如何构造图像域外部的像素值。 更多... | |
| enum | VPIConversionPolicy |
| 在图像类型之间转换时使用的策略。 更多... | |
| enum | VPICornerScore |
| 定义不同类型的角点得分。 更多... | |
| enum | VPITrackingState |
| 对象跟踪状态。 更多... | |
| enum | VPIOpticalFlowQuality |
| 定义光流算法的质量。 更多... | |
| enum | VPILockMode |
| 定义内存锁定函数使用的锁定模式。 更多... | |
| enum | VPIEventState |
| 定义事件的状态。 更多... | |
| enum | VPIFlipMode |
| 定义图像翻转方向。 更多... | |
| enum | VPINormType |
| 定义向量的大小。 更多... | |
| enum | VPIGradientMethod |
| 生成梯度的不同方法。 更多... | |
内存创建标志。 | |
| #define | VPI_BACKEND_TEGRA (VPI_BACKEND_VIC | VPI_BACKEND_NVENC | VPI_BACKEND_OFA) |
| 仅 Tegra 后端。 | |
| #define | VPI_BACKEND_MASK ((VPI_BACKEND_INVALID << 1) - 1) |
| 仅 Tegra 后端。 | |
| #define | VPI_BACKEND_ALL (VPI_BACKEND_CPU | VPI_BACKEND_CUDA | VPI_BACKEND_PVA | VPI_BACKEND_VIC | VPI_BACKEND_NVENC | VPI_BACKEND_OFA) |
| 所有后端。 | |
| enum | VPIBackend |
| VPI 后端类型。 更多... | |
详细描述
定义了使用 VPI 编程所需的所有类型。
文件 Types.h 中的定义。
数据结构文档
◆ VPIBriefDescriptor
| struct VPIBriefDescriptor |
宏定义文档
◆ VPI_EXCLUSIVE_STREAM_ACCESS
| #define VPI_EXCLUSIVE_STREAM_ACCESS (1ULL << 16) |
◆ VPI_RESTRICT_MEM_USAGE
| #define VPI_RESTRICT_MEM_USAGE (1ULL << 17) |
◆ VPI_REQUIRE_BACKENDS
| #define VPI_REQUIRE_BACKENDS (1ULL << 18) |
◆ VPI_STAT_PIXEL_COUNT
枚举类型文档
◆ VPICornerScore
| enum VPICornerScore |
◆ VPITrackingState
| enum VPITrackingState |
对象跟踪状态。
| 枚举器 | |
|---|---|
| VPI_TRACKING_STATE_LOST | 对象不再被跟踪。 此状态可以由用户设置,当此对象不再需要被跟踪时,或者由跟踪函数根据某些跟踪置信度标准设置。状态为 VPI_TRACKING_STATE_LOST 的现有对象可以重复用于新对象。从此状态的有效转换是 |
| VPI_TRACKING_STATE_NEW | 要跟踪的新对象。 此状态由用户为要跟踪的新对象定义。从此状态的有效转换是 |
| VPI_TRACKING_STATE_TRACKED | 对象正在以高置信度被跟踪。 对象正在输入帧中被定位,并且由于外部建立了高置信度,认为边界框是准确的,因此可以使用当前估计的位置更新其内部模型。从此状态的有效转换是 |
| VPI_TRACKING_STATE_SHADOW_TRACKED | 对象正在以低置信度被跟踪。 对象在帧中被定位,但由于对其边界框位置/大小的置信度较低,因此其模型未被更新。从此状态的有效转换是 |
◆ VPIFlipMode
| enum VPIFlipMode |
◆ VPINormType
| enum VPINormType |
◆ VPIGradientMethod
| enum VPIGradientMethod |