Canny 边缘检测器
概述
Canny 边缘检测器是一种边缘检测算子,它使用多阶段算法来检测图像中各种各样的边缘,请参阅 [1]。下表显示了一个输入图像示例、Canny 边缘检测器算法的一组输入参数(如下所述)以及相应的边缘图像。
| 输入 | 参数 | 输出 |
|---|---|---|
 | \begin{align*} \mathit{normType} &= VPI\_NORM\_L2 \\ \mathit{gradMethod} &= GEN\_GRADIENT\_SOBEL \\ \mathit{gradientSize} &= 3 \\ \mathit{edgeValue} &= 255 \\ \mathit{nonEdgeValue} &= 0 \\ \mathit{thresholdStrong} &= 300 \\ \mathit{thresholdWeak} &= 100 \end{align*} | 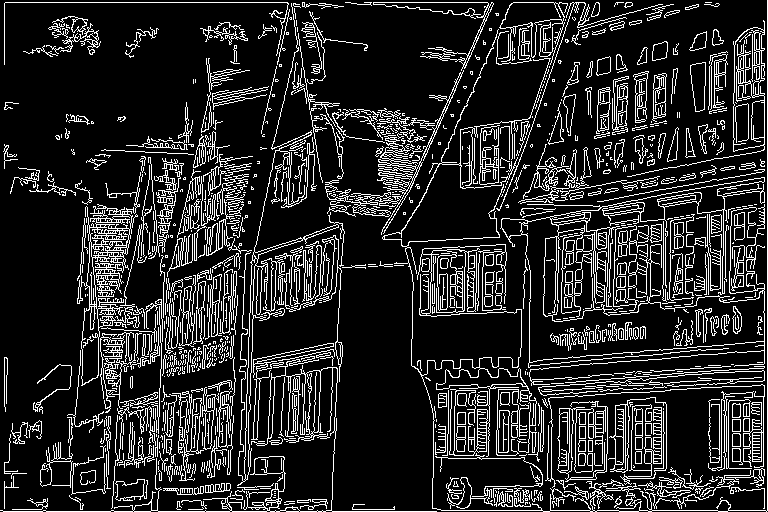 |
实现
Canny 边缘检测器是一种多阶段算法
- 降噪
由于边缘检测很容易受到噪声的影响,因此首先对图像应用高斯滤波器。 - 查找图像中每个像素的强度和角度
然后,将阶段 1 中平滑后的图像与水平和垂直方向的边缘检测滤波器进行滤波,得到 \(G_x\) 和 \(G_y\)。每个像素的强度和角度计算如下\begin{align*} Intensity &= \sqrt{G_x^2 + G_y^2} \\ Angle &= arctan(\frac{G_y}{G_x}) \end{align*}
梯度方向始终垂直于边缘。它被四舍五入为代表垂直、水平和两个对角线方向的四个角度之一。 - 通过非极大值抑制细化边缘
对于图像中的每个像素,检查强度是否是梯度方向上的局部最大值。如果是,则将其保留为边缘像素,否则将其删除为非边缘像素。 - 双阈值处理
提供了两个阈值,它们被称为强阈值和弱阈值。对于每个像素,如果强度大于强阈值,则将其标记为强边缘。如果强度小于弱阈值,则将其标记为非边缘。任何强度值介于强阈值和弱阈值之间都被标记为弱边缘。 - 通过迟滞跟踪边缘
如果弱边缘连接到强边缘,则此弱边缘将更改为强边缘。重复此过程,直到找到所有连接到强边缘的弱边缘。将剩余的弱边缘标记为非边缘。
C API 函数
有关实现该算法的限制、约束和后端的列表,请查阅以下函数的参考文档
| 函数 | 描述 |
|---|---|
| vpiCreateCannyEdgeDetector | 为 vpiSubmitCannyEdgeDetector 创建负载。 |
| vpiInitCannyEdgeDetectorParams | 使用默认值初始化 vpiInitCannyEdgeDetectorParams。 |
| vpiSubmitCannyEdgeDetector | 对图像运行 Canny 边缘检测器算法。 |
用法
语言- 导入 VPI 模块import vpi
- 使用 CUDA 后端和给定的内核在输入图像上运行 Canny 边缘检测器。输入和输出是 VPI 图像。with vpi.Backend.CUDAoutput = input.canny(thresh_strong=300, thresh_weak=100, edge_value=255, nonedge_value=0, norm=vpi.Norm.L2)
- 初始化阶段
- 包含定义 Canny 边缘检测器算法函数和参数结构的头文件。#include <vpi/algo/CannyEdges.h>声明实现 Canny 边缘检测器算法的函数。
- 定义输入图像对象。VPIImage input = /*...*/;
- 创建输出图像对象。int32_t w, h;vpiImageGetSize(input, &w, &h);VPIImage output;vpiImageCreate(w, h, VPI_IMAGE_FORMAT_U8, 0, &output);VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)使用指定的标志创建空的图像实例。VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)获取图像尺寸(以像素为单位)。
- 创建将在其中提交算法以执行的流。VPIStream stream;vpiStreamCreate(0, &stream);
- 为将执行校正的 Canny 边缘检测器算法创建负载。int width, height;vpiImageGetSize(input, &width, &height);VPIPayload payload;vpiCreateCannyEdgeDetector(VPI_BACKEND_CUDA, width, height, &payload);VPIStatus vpiCreateCannyEdgeDetector(uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIPayload *payload)为 vpiSubmitCannyEdgeDetector 创建负载。
- 包含定义 Canny 边缘检测器算法函数和参数结构的头文件。
- 处理阶段
- 使用用户提供的参数初始化参数结构。在此示例中,参数设置为反映上面的输出,VPICannyEdgeDetectorParams params;vpiInitCannyEdgeDetectorParams(¶ms);VPIStatus vpiInitCannyEdgeDetectorParams(VPICannyEdgeDetectorParams *params)使用默认值初始化 vpiInitCannyEdgeDetectorParams。
- 将算法及其参数提交到流。float thresholdStrong = 300;float thresholdWeak = 100;float edgeValue = 255;float nonEdgeValue = 0;VPI_CHECK_STATUS(vpiSubmitCannyEdgeDetector(stream, VPI_BACKEND_CUDA, payload, input, output, thresholdStrong,thresholdWeak, edgeValue, nonEdgeValue, ¶ms));VPIStatus vpiSubmitCannyEdgeDetector(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage input, VPIImage output, float thresholdStrong, float thresholdWeak, float edgeValue, float nonEdgeValue, const VPICannyEdgeDetectorParams *params)对图像运行 Canny 边缘检测器算法。
- (可选)等待直到处理完成。vpiStreamSync(stream);
- 使用用户提供的参数初始化参数结构。在此示例中,参数设置为反映上面的输出,
- 清理阶段
- 释放流、输入图像和输出图像所持有的资源。
有关更多信息,请参阅 VPI - 视觉编程接口 的“C API 参考”部分中的 Canny 边缘检测器。
性能
有关如何使用下面的性能表的信息,请参阅 算法性能表。
在比较测量结果之前,请查阅 比较算法运行时间。
有关性能基准测试方式的更多信息,请参阅 性能基准。