在一系列帧上运行 KLT 特征追踪。 更多...
数据结构 | |
| 结构体 | VPIKLTFeatureTrackerCreationParams |
| KLT 特征追踪器的创建参数。 更多... | |
| 结构体 | VPIKLTFeatureTrackerParams |
| 定义 vpiCreateKLTFeatureTracker 参数的结构体。 更多... | |
| 结构体 | VPIKLTTrackedBoundingBox |
| 存储由 KLT 追踪器 追踪的边界框。 更多... | |
枚举 | |
| 枚举 | VPIKLTFeatureTrackerType |
| KLT 特征追踪器算法类型。 更多... | |
函数 | |
| VPIStatus | vpiInitKLTFeatureTrackerCreationParams (VPIKLTFeatureTrackerCreationParams *params) |
| 使用默认值初始化 VPIKLTFeatureTrackerCreationParams。 更多... | |
| VPIStatus | vpiCreateKLTFeatureTracker (uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat imageFormat, const VPIKLTFeatureTrackerCreationParams *params, VPIPayload *payload) |
| 为 vpiSubmitKLTFeatureTracker 创建负载。 更多... | |
| VPIStatus | vpiInitKLTFeatureTrackerParams (VPIKLTFeatureTrackerParams *params) |
| 使用默认值初始化 VPIKLTFeatureTrackerParams。 更多... | |
| VPIStatus | vpiSubmitKLTFeatureTracker (VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage templateImage, VPIArray inputBoxList, VPIArray inputPredictionList, VPIImage referenceImage, VPIArray outputBoxList, VPIArray outputEstimationList, const VPIKLTFeatureTrackerParams *params) |
| 在两个帧上运行 KLT 特征追踪器。 更多... | |
详细描述
在一系列帧上运行 KLT 特征追踪。
有关更多详细信息和用法示例,请参阅 KLT 特征追踪器。
数据结构文档
◆ VPIKLTFeatureTrackerCreationParams
| struct VPIKLTFeatureTrackerCreationParams |
KLT 特征追踪器的创建参数。
定义于文件 KLTFeatureTracker.h 的第 80 行。
 VPIKLTFeatureTrackerCreationParams 的协作图
VPIKLTFeatureTrackerCreationParams 的协作图◆ VPIKLTFeatureTrackerParams
| struct VPIKLTFeatureTrackerParams |
定义 vpiCreateKLTFeatureTracker 参数的结构体。
定义于文件 KLTFeatureTracker.h 的第 173 行。
VPIKLTFeatureTrackerParams 的协作图| 数据字段 | ||
|---|---|---|
| int32_t | numberOfIterationsScaling | 尺度估计的逆组合迭代次数。
|
| float | nccThresholdUpdate | 需要模板更新的阈值。
|
| float | nccThresholdKill | 认为模板追踪丢失的阈值。
|
| float | nccThresholdStop | 提前停止迭代的阈值。
|
| float | maxScaleChange | 最大相对尺度变化。 大于此值的尺度变化将使 KLT 认为追踪丢失。
|
| float | maxTranslationChange | 最大相对平移变化。
|
| VPIKLTFeatureTrackerType | trackingType | 将要执行的 KLT 追踪类型。 |
◆ VPIKLTTrackedBoundingBox
| struct VPIKLTTrackedBoundingBox |
VPIKLTTrackedBoundingBox 的协作图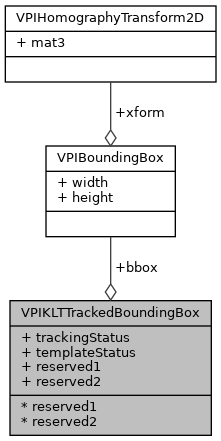
| 数据字段 | ||
|---|---|---|
| VPIBoundingBox | bbox | 正在追踪的边界框。 |
| int8_t | trackingStatus | 此边界框的追踪状态。 接受的值
|
| int8_t | templateStatus | 与此边界框相关的模板的状态。 接受的值
|
| uint8_t | reserved1 | 为将来使用保留。 |
| uint8_t | reserved2 | 为将来使用保留。 |
枚举类型文档
◆ VPIKLTFeatureTrackerType
#include <vpi/algo/KLTFeatureTracker.h>
KLT 特征追踪器算法类型。
| 枚举器 | |||
|---|---|---|---|
| VPI_KLT_INVERSE_COMPOSITIONAL | KLT 追踪器的逆组合算法。 逆组合算法是经典 Lucas-Kanade 算法的重新表述,使最速下降图像和 Hessian 矩阵保持不变。
| ||
定义于文件 KLTFeatureTracker.h 的第 156 行。
函数文档
◆ vpiInitKLTFeatureTrackerCreationParams()
| VPIStatus vpiInitKLTFeatureTrackerCreationParams | ( | VPIKLTFeatureTrackerCreationParams * | params | ) |
#include <vpi/algo/KLTFeatureTracker.h>
使用默认值初始化 VPIKLTFeatureTrackerCreationParams。
默认值
- maxTemplateCount: 128
- maxTemplateWidth: 64
- maxTemplateHeight: 64
- 参数
-
[输出] params 要填充默认值的结构体。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT params为 NULL。VPI_SUCCESS 操作成功执行。
◆ vpiCreateKLTFeatureTracker()
| VPIStatus vpiCreateKLTFeatureTracker | ( | uint64_t | backends, |
| int32_t | imageWidth, | ||
| int32_t | imageHeight, | ||
| VPIImageFormat | imageFormat, | ||
| const VPIKLTFeatureTrackerCreationParams * | params, | ||
| params | VPIPayload * | ||
| ) |
#include <vpi/algo/KLTFeatureTracker.h>
payload
- 参数
-
[输入] backends 有资格执行该算法的 VPI 后端。 - 有效值
- 后端必须在当前上下文中启用。
[输入] imageWidth, imageHeight 输入图像尺寸。 - 在 PVA 上,尺寸必须介于 65x65 和 3264x2448 之间。
- 必须 >= 0 (其他后端)。
[输入] imageFormat 输入图像格式。 - 接受的图像格式为
- VPI_IMAGE_FORMAT_U8
- VPI_IMAGE_FORMAT_S8
- VPI_IMAGE_FORMAT_U16 (PVA 仅支持此格式,像素值范围必须介于 0 和 255 之间)
- VPI_IMAGE_FORMAT_S16
[输入] params params [输出] payload 指向接收创建句柄的负载变量的指针。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT VPI_ERROR_INVALID_ARGUMENT VPI_ERROR_INVALID_ARGUMENT payload为 NULL。VPI_ERROR_INVALID_ARGUMENT imageWidth和imageHeight超出有效范围。VPI_ERROR_INVALID_ARGUMENT params中的maxTemplateWidth和maxTemplateHeight超出有效范围。VPI_ERROR_INVALID_ARGUMENT params中的maxTemplateCount超出有效范围。backends引用无效的后端。VPI_IMAGE_FORMAT_INVALID 不支持 imageFormat。VPI_ERROR_INVALID_OPERATION 不支持 imageFormat。PVA 硬件不可用。 后端在当前上下文中未启用。 VPI_ERROR_NOT_IMPLEMENTED 给定后端不支持 KLT 特征追踪器算法。 VPI_ERROR_INVALID_CONTEXT 当前上下文已销毁。 VPI_ERROR_OUT_OF_MEMORY VPI_SUCCESS 操作成功执行。
无法分配所需资源。
#include <vpi/algo/KLTFeatureTracker.h>
默认值
- params
- 使用默认值初始化 VPIKLTFeatureTrackerParams。
- 默认值
- numberOfIterationsScaling: 20
- nccThresholdUpdate: 0.8
- nccThresholdKill: 0.6
- nccThresholdStop: 1.0
- 参数
-
[输出] params 要填充默认值的结构体。
- maxScaleChange: 0.2
- maxTranslationChange: 1.5
trackingType: VPI_KLT_INVERSE_COMPOSITIONAL
| 返回 | ( | 失败时返回错误代码,否则返回 VPI_SUCCESS。 | ◆ vpiSubmitKLTFeatureTracker(), |
| uint64_t | VPIStatus vpiSubmitKLTFeatureTracker, | ||
| VPIStream | payload, | ||
| stream | uint64_t , | ||
| backend | VPIPayload , | ||
| backend | payload, | ||
| stream | VPIImage , | ||
| backend | templateImage, | ||
| backend | VPIArray , | ||
| inputBoxList | VPIArray | ||
| ) |
#include <vpi/algo/KLTFeatureTracker.h>
inputPredictionList
- 参数
-
[输入] ◆ vpiSubmitKLTFeatureTracker() referenceImage - VPIArray
- outputBoxList
[输入] VPIStatus vpiSubmitKLTFeatureTracker VPIArray - outputEstimationList
[输入] payload const VPIKLTFeatureTrackerParams * [输入] VPIImage params - VPIArray
- 在两个帧上运行 KLT 特征追踪器。
- 输出追踪的边界框和估计的变换数组。
[输入] VPIPayload [输入] - VPIArray
- 将在其中排队操作的流。
- 不能为空。
- 流必须已启用将执行该算法的后端。
[输入] payload 将执行该算法的后端。 - VPIArray
- 必须是在负载创建期间指定的后端,或使用 0 作为使用此后端的简写。
- 不能为空。
- 流必须已启用将执行该算法的后端。
[输入] uint64_t 由 vpiCreateKLTFeatureTracker 创建的负载。 - VPIArray
- 参考图像。
- 输出追踪的边界框和估计的变换数组。
[输出] templateImage 必须具有与模板图像相同的尺寸和格式。 - VPIArray
- 将在其中排队操作的流。
- 不能为空。
- 流必须已启用将执行该算法的后端。
[输出] VPIArray 图像必须已启用将执行该算法的后端。 - VPIArray
- 必须是在负载创建期间指定的后端,或使用 0 作为使用此后端的简写。
- 不能为空。
- 流必须已启用将执行该算法的后端。
[输入] params 输入边界框数组。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT 必须具有类型 VPI_ARRAY_TYPE_KLT_TRACKED_BOUNDING_BOX。 VPI_ERROR_INVALID_ARGUMENT 数组必须已启用将执行该算法的后端。 VPI_ERROR_INVALID_ARGUMENT params为 NULL。VPI_ERROR_INVALID_ARGUMENT 在 PVA 上,数组容量必须 >= 128。 VPI_ERROR_INVALID_ARGUMENT 输入预测变换数组。 VPI_ERROR_INVALID_ARGUMENT 必须具有类型 VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D。 VPI_ERROR_INVALID_ARGUMENT 模板图像。 VPI_ERROR_INVALID_ARGUMENT 必须具有与 referenceImage相同的尺寸和格式。VPI_ERROR_INVALID_ARGUMENT 输出边界框数组。 VPI_ERROR_INVALID_ARGUMENT 估计的变换数组。 KLT 特征追踪器算法的控制参数。 VPI_ERROR_INVALID_ARGUMENT 不支持 imageFormat。stream为 NULL。VPI_SUCCESS 操作成功执行。