检测图像中的 AprilTags (https://april.eecs.umich.edu/software/apriltag)。 更多...
数据结构 | |
| 结构体 | VPIAprilTagDecodeParams |
| vpiCreateAprilTagDetector 的解码参数。 更多... | |
| 结构体 | VPIAprilTagDetection |
| 存储来自 AprilTag 检测器 的 AprilTag 检测信息。 更多... | |
枚举 | |
| 枚举 | VPIAprilTagFamily |
| 指定要检测的 AprilTag 标签族。 更多... | |
函数 | |
| VPIStatus | vpiInitAprilTagDecodeParams (VPIAprilTagDecodeParams *params) |
| 使用默认值初始化 VPIAprilTagDecodeParams。 更多... | |
| VPIStatus | vpiCreateAprilTagDetector (uint64_t backends, int32_t inputWidth, int32_t inputHeight, VPIAprilTagDecodeParams const *params, VPIPayload *payload) |
| 创建 AprilTag 检测器 有效载荷。 更多... | |
| VPIStatus | vpiSubmitAprilTagDetector (VPIStream stream, uint64_t backend, VPIPayload payload, uint32_t maxDetections, VPIImage input, VPIArray outDetections) |
| 将 AprilTag 检测器 操作提交到流。 更多... | |
| VPIStatus | vpiSubmitAprilTagPoseEstimation (VPIStream stream, uint64_t backend, VPIArray inDetections, const VPICameraIntrinsic intrinsics, float tagSize, VPIArray outPoses) |
| 将 AprilTag 位姿估计 操作提交到流。 更多... | |
详细描述
检测图像中的 AprilTags (https://april.eecs.umich.edu/software/apriltag)。
有关更多详细信息和使用示例,请参阅 AprilTag 检测器和位姿估计器。
数据结构文档
◆ VPIAprilTagDecodeParams
| struct VPIAprilTagDecodeParams |
 VPIAprilTagDecodeParams 的协作图
VPIAprilTagDecodeParams 的协作图
| 数据字段 | ||
|---|---|---|
| const uint16_t * | tagIdFilter | 来自标签族的标签 ID 可选数组,表示有效检测结果。 设置为 NULL 以检测来自该族的所有标签。在调用 vpiCreateAprilTagDetector 后可以释放数据。 |
| int32_t | tagIdFilterSize | 如果 tagIdFilter 数组不为 NULL,则为该数组的大小。
|
| int32_t | maxBitsCorrected | 解码期间要纠正的最大位数。
|
| VPIAprilTagFamily | family | 要检测的标签族。 |
◆ VPIAprilTagDetection
| struct VPIAprilTagDetection |
存储来自 AprilTag 检测器 的 AprilTag 检测信息。
VPIAprilTagDetection 的协作图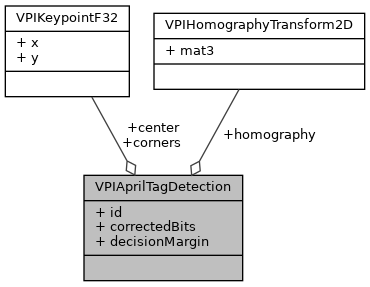
| 数据字段 | ||
|---|---|---|
| uint16_t | id | 标签的解码 ID。 |
| int16_t | correctedBits | 此检测纠正的位数。 |
| float | decisionMargin | 二进制解码过程质量的度量:数据位强度与决策阈值之间的平均差值。 数字越大,大致表示解码效果越好。这仅对于非常小的标签才是检测精度的合理度量。 |
| VPIHomographyTransform2D | homography | 从“理想”标签(角位于 (-1,1)、(1,1)、(1,-1) 和 (-1, -1))到图像中像素的投影的 3x3 单应性矩阵。 |
| VPIKeypointF32 | center | 检测中心在图像像素坐标中的位置。 |
| VPIKeypointF32 | corners[4] | 标签角点在图像像素坐标中的位置,逆时针顺序排列。 |
枚举类型文档
◆ VPIAprilTagFamily
| enum VPIAprilTagFamily |
#include <vpi/algo/AprilTags.h>
指定要检测的 AprilTag 标签族。
标签族由布局、标签中的位数以及有效码字之间的最小汉明距离定义。
定义于文件 AprilTags.h 的第 83 行。
函数文档
◆ vpiInitAprilTagDecodeParams()
| VPIStatus vpiInitAprilTagDecodeParams | ( | VPIAprilTagDecodeParams * | params | ) |
#include <vpi/algo/AprilTags.h>
使用默认值初始化 VPIAprilTagDecodeParams。
默认值
- tagIdFilter: NULL
- tagIdFilterSize: 0
- maxBitsCorrected: 2
- family: VPI_APRILTAG_36H11
- 参数
-
[out] params 要填充默认值的结构体。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT params为 NULLVPI_SUCCESS 操作成功执行。
◆ vpiCreateAprilTagDetector()
| VPIStatus vpiCreateAprilTagDetector | ( | uint64_t | backends, |
| int32_t | inputWidth, | ||
| int32_t | inputHeight, | ||
| VPIAprilTagDecodeParams const * | params, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/AprilTags.h>
创建 AprilTag 检测器 有效载荷。
此函数分配算法所需的所有临时内存。
- 参数
-
[in] backends 有资格执行该算法的 VPI 后端。 - 有效值
- 后端必须在当前上下文中启用。
- 如果使用 VPI_BACKEND_PVA,则 VPIStream 和输入/输出缓冲区必须同时支持 VPI_BACKEND_PVA 和 VPI_BACKEND_CPU。
[in] inputWidth,inputHeight 将用于此有效载荷的输入图像的尺寸。 - 必须 > 0。
[in] params 检测器的解码参数。传递 NULL 以使用 vpiInitAprilTagDecodeParams 给出的默认值。 [out] payload 指向接收创建的句柄的有效载荷变量的指针。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT payload为 NULL。VPI_ERROR_INVALID_ARGUMENT backends指的是无效的后端。VPI_ERROR_INVALID_ARGUMENT inputWidth或inputHeight超出有效范围。VPI_ERROR_INVALID_ARGUMENT params为 NULL 或包含无效配置。VPI_ERROR_INVALID_OPERATION 后端硬件不可用,或者后端在当前上下文中不可用。 VPI_ERROR_NOT_IMPLEMENTED 算法不支持给定的后端。 VPI_ERROR_INVALID_CONTEXT 当前上下文已销毁。 VPI_ERROR_OUT_OF_MEMORY 无法分配所需资源。 VPI_SUCCESS 操作成功执行。
◆ vpiSubmitAprilTagDetector()
| VPIStatus vpiSubmitAprilTagDetector | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| uint32_t | maxDetections, | ||
| VPIImage | input, | ||
| VPIArray | outDetections | ||
| ) |
#include <vpi/algo/AprilTags.h>
将 AprilTag 检测器 操作提交到流。
- 参数
-
[in] stream 操作将排队进入的流。 - 不得为 NULL。
- 流必须已启用将执行该算法的后端。
[in] backend 将执行该算法的后端。 - 必须是有效载荷创建期间指定的后端,或者为 0 以简写形式使用此后端。
[in] payload 要与其他参数一起提交的有效载荷。 [in] maxDetections 要在 outDetections 中返回的最大检测数。 [in] input 用于检测的输入图像 - 不得为 NULL。
- 必须与 vpiCreateAprilTagDetector 中使用的尺寸匹配。
- 图像必须已启用将执行该算法的后端。
- 必须具有 VPI_IMAGE_FORMAT_U8 格式
[out] outDetections 将接收检测结果的数组。数组大小会使用找到的标签数进行更新。 - 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_APRILTAG_DETECTION 类型。
- 数组必须已启用将执行该算法的后端。
- 如果检测到的标签多于数组容量,则会丢弃额外的标签检测结果。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT stream为 NULL。VPI_ERROR_INVALID_ARGUMENT input为 NULL。VPI_ERROR_INVALID_ARGUMENT input图像尺寸与传递给 vpiCreateAprilTagDetector 的尺寸不匹配。VPI_ERROR_INVALID_ARGUMENT backend与用于创建有效载荷的后端不匹配。VPI_ERROR_INVALID_IMAGE_FORMAT 不支持 input图像格式。VPI_ERROR_INVALID_PAYLOAD_TYPE payload无效或为 NULL。VPI_ERROR_NOT_IMPLEMENTED 算法不支持给定的后端。 VPI_ERROR_INVALID_OPERATION 后端硬件不可用。 VPI_ERROR_INVALID_OPERATION 所需的后端未在 stream、input或outDetections中启用。VPI_SUCCESS 操作成功执行。
◆ vpiSubmitAprilTagPoseEstimation()
| VPIStatus vpiSubmitAprilTagPoseEstimation | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIArray | inDetections, | ||
| const VPICameraIntrinsic | intrinsics, | ||
| float | tagSize, | ||
| VPIArray | outPoses | ||
| ) |
#include <vpi/algo/AprilTags.h>
将 AprilTag 位姿估计 操作提交到流。
- 参数
-
[in] stream 操作将排队进入的流。 - 不得为 NULL。
- 流必须已启用将执行该算法的后端。
[in] backend 将执行该算法的后端。 - 有效值
- 后端必须在当前上下文中启用。
[in] inDetections AprilTag 检测数组。 - 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_APRILTAG_DETECTION 类型。
- 数组必须已启用将执行该算法的后端。
[in] intrinsics 相机内参 [in] tagSize 标签边长 - 必须 > 0
[out] outPoses 将接收位姿估计的数组。数组大小将设置为与 inDetections 相同。 - 不得为 NULL。
- 它必须具有 VPI_ARRAY_TYPE_POSE 类型。
- 数组必须已启用将执行该算法的后端。
- 容量必须等于或大于 inDetections 的大小。
- 返回值
-
VPI_ERROR_INVALID_ARGUMENT stream为 NULL。VPI_ERROR_INVALID_ARGUMENT inDetections或outPoses为 NULL。VPI_ERROR_NOT_IMPLEMENTED 算法不支持给定的后端。 VPI_ERROR_INVALID_OPERATION 后端硬件不可用。 VPI_ERROR_INVALID_OPERATION 所需的后端未在 stream、inDetections或outPoses中启用。VPI_SUCCESS 操作成功执行。