DeepStream 感知#
概述#
Jetson 平台服务提供基于 DeepStream 7.1 的感知服务,支持开箱即用的优化、实时和多流对象检测和跟踪支持。结合 SDR 和 VST 微服务,这也支持自动添加摄像头流。处理过程包括使用 NVIDIA 的 PeopleNet 模型(默认)或可选使用 YOLOv8s(如下所述)进行对象检测,然后使用 DeepStream 中提供的 NvDCF 跟踪器插件进行对象跟踪。应用程序的输出是基于 Metropolis 模式的元数据,使用 msgbroker 插件发送到 Redis 消息总线。
与标准示例容器相比,修改后的 Jetson 平台服务 DeepStream 7.1 容器具有以下更改
Service Maker deepstream-test5 应用程序的预编译版本
PeopleNet2.6 模型和校准文件,以及适用于各种 Jetson 平台和批大小的许多预编译引擎文件
预编译的跟踪器引擎文件
预编译的 YOLOv8s 插件和引擎文件
Jetson 平台服务使用基于新的 Service Maker 框架的示例 deepstream-test5 应用程序,该框架作为 DeepStream 7.1 的一部分受支持,用于以编程方式组装 DeepStream 管道,其源代码作为原生 DeepStream 安装和 DeepStream Docker 容器的一部分提供。传递到此应用程序的选项如下
-s选项指定源列表配置文件。如果使用包含 nvmultiurisrcbin 的配置(如 AI-NVR 提供的参考配置),则启用 DeepStream 中的添加/删除 API。-c选项指定管道配置文件,其中包含程序管道中的各种组件和连接。-l选项指定模型的标签文件。--perf-measurement-interval-sec选项指定打印 fps 信息的频率(秒)。#example for running on Orin AGX $ /opt/nvidia/deepstream/deepstream-7.1/service-maker/sources/apps/cpp/deepstream_test5_app/build/deepstream-test5-app -s /ds-config-files/pn26/service-maker/source-list-0_agx.yaml,/ds-config-files/pn26/service-maker/source-list-1_agx.yaml -c /ds-config-files/pn26/service-maker/ds-config-0_agx.yaml,/ds-config-files/pn26/service-maker/ds-config-1_agx.yaml -l /ds-config-files/pn26/labels.txt --perf-measurement-interval-sec 5
为了运行多个管道,您必须指定多个源列表和配置文件,并用逗号分隔,如上面的示例所示。
在 Orin AGX 和 Orin NX16 上,这些管道通过其 gie 配置文件 (config/deepstream/pn26/config_infer_primary_*) 使用 DLA 0 和 1
enable-dla=1 # 0 => disable, 1 => enable use-dla-core=0 # dla core number => 0, 1, etc.
在 Orin NX8 上,只有一个 DLA 可用,因此只使用一个,而在 Orin Nano 上则使用 GPU。
请注意,用户也可以将传统的 test5 应用程序(默认包含在 DeepStream 7.1 容器中)作为其基于 Jetson 平台服务的系统的一部分,前提是与 Jetson 平台服务架构其余部分的集成点(在流添加 API 和 Metropolis 模式的元数据输出方面)得到保留。
DeepStream 配置文件位于 Docker Compose 仓库的 config/deepstream/pn26 文件夹中。每个配置都标有文件名末尾的设备类型 - agx、nx16、nx8 或 nano。此文件夹挂载在 DeepStream Docker 容器中。根据运行的 compose 文件(Orin AGX 的 compose_agx.yaml,Orin NX16 的 compose_nx16.yaml,Orin NX8 的 compose_nx8.yaml,Orin Nano 的 compose_nano.yaml),相应的 DeepStream 配置文件将传递到 DeepStream 应用程序。为所有支持的系统提供了 Service Maker 和传统版本的 DeepStream test5 应用程序的配置。
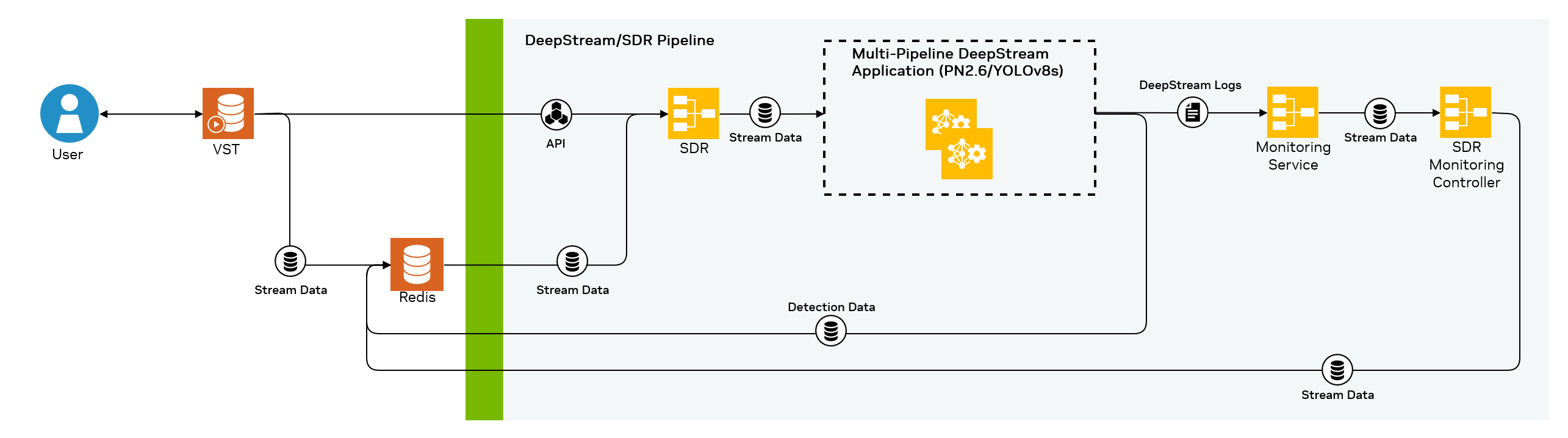
一个名为 SDR 的附加容器用于根据 VST 中发生的事件自动从 DeepStream 应用程序添加和删除流。下面可以看到 DeepStream 和 VST 如何与其他组件交互的概述
GitHub 仓库#
作为参考,JPS DeepStream 容器的 Dockerfile 和 YOLOv8s 的初始化脚本已开源,可在 GitHub 上 jetson-platform-services 仓库的 inference/perception 文件夹下找到。
配置#
DeepStream 配置文件应该不需要进行更改。Orin AGX 上每个 DLA 最多支持 8 个流(总共 16 个),Orin NX16 上每个 DLA 支持 4 个流(总共 8 个),Orin NX8 上总共 4 个流,Orin Nano 上总共 4 个流。关于配置的要点包括
使用 PeopleNet 2.6 (PN2.6) 未剪枝模型以获得卓越的准确性,或使用 YOLOv8s 以获得多类支持
在 Orin AGX、Orin NX16 和 Orin NX8 上,使用 DLA 为 PN2.6 分担 GPU 的推理负载
根据 primary-gie 部分中的 interval 参数,每隔一帧进行推理
使用 NvDCF 多对象跟踪器,该跟踪器支持在 PVA 后端上运行 PN2.6(在 Orin AGX、NX16、NX8 上),以进一步降低 GPU 的负载
使用 Redis 消息代理进行元数据输出
使用动态流添加功能,通过 SDR 微服务添加流(见下文)
要增加或减少每个管道的流数量(从默认值开始),需要更改 compose yaml 文件下的 WDM_WL_THRESHOLD 值。同样,VST 配置 (config/vst/vst_config.json) 中的 max_devices_supported 值也可能需要编辑以支持必要的流数量。为了获得最佳性能,应修改 DeepStream 配置中设置的批大小选项,以及生成和使用特定于新批大小和可用硬件(即 DLA)的引擎文件。
SDR(传感器分配和路由)#
向 DeepStream 添加流是基于一个名为 SDR 的专用微服务,用于从 VST 发现流并将它们动态添加到 DeepStream。SDR 用于使用 DeepStream 中的动态流添加功能,根据 VST 的事件触发,自动从 DeepStream 添加和删除流。当流添加到 VST 并且能够流式传输时,VST 会向 Redis 发送一个事件,格式如下
{
"alert_type": "camera_status_change",
"created_at": "2023-11-20T23:51:04Z",
"event": {
"camera_id": "MOJD7",
"camera_name": "36398191-d48a-4260-b574-239fd59f156f",
"camera_url": "rtsp://172.17.170.143/live/36398191-d48a-4260-b574-239fd59f156f",
"change": "camera_streaming"
},
"source": "vst"
}
SDR 接收到此事件,然后确定 DeepStream 中当前哪个管道可用,并将其添加到该管道。
有时,当 SDR 启动时,VST 可能已经添加了流,并且不会在 Redis 上重新发送消息。例如,如果 SDR 重新启动,则可能会发生这种情况。为了解决这个问题,在启动时,SDR 会查询 VST 实时流端点,以获取已添加的流。然后,它也会将这些流添加到 DeepStream。
SDR 跟踪每个流添加到哪个管道。这样,当流被删除时,它就知道向哪个管道发送删除请求。每个 DeepStream 管道都有一个不同的端口,在使用添加或删除 API 调用时需要指定。
要向 DeepStream 添加流,必须向 https://:9010/api/v1/stream/add 端点发出 POST 请求。请注意,localhost 可能需要更改为正确的 IP,并且端口从 9010 更改为其他端口 - 默认情况下,端口 9010 用于管道 1,端口 9011 用于管道 2,这在 DeepStream 配置文件中指定。以下 JSON 也必须包含在请求中
{ "alert_type": "camera_status_change", "created_at": "2024-05-01T07:49:16Z", "event": { "camera_id": "Amcrest_3", "camera_name": "0227ed9f-de24-495e-b46f-b9d2b8122dd5", "camera_url": "rtsp://172.17.170.143/live/0227ed9f-de24-495e-b46f-b9d2b8122dd5", "change": "camera_streaming" }, "source": "vst" }
要从 DeepStream 中删除流,必须向 https://:9010/api/v1/stream/remove 端点发出 POST 请求。同样,localhost 可能需要更改为正确的 IP 并指定正确的端口。以下 JSON 也必须包含在请求中
{ "alert_type": "camera_status_change", "created_at": "2024-05-01T07:49:16Z", "event": { "camera_id": "Amcrest_3", "camera_name": "0227ed9f-de24-495e-b46f-b9d2b8122dd5", "camera_url": "rtsp://172.17.170.143/live/0227ed9f-de24-495e-b46f-b9d2b8122dd5", "change": "camera_remove" }, "source": "vst" }
请注意,只有 camera_id、camera_name、camera_url 和 change 值是必要的,其他所有内容都是可选的。另请注意,这两个 API 端点直接与 DeepStream 接口,因此如果手动使用,将跳过 SDR,并可能导致问题。在内部,SDR 使用这些端点和 JSON 格式与 DeepStream 接口。当在传统配置文件中使用 [source-list] 或在 Service Maker 配置中使用 nvmultiurisrcbin 时,默认 DeepStream test5 应用程序中提供了这些添加和删除端点。
SDR 还支持在 VST 丢失某些流的情况下进行协调。SDR sidecar 容器偶尔会查询 SDR 缓存和 VST 中的当前流,以确保它们同步,并在它们不同步的情况下根据需要在 SDR 中调用添加/删除功能。
有各种 SDR 配置选项可以通过容器环境变量设置,并且可以在 Docker Compose yaml 文件中使用。这些选项在下面指定。请注意,示例 docker compose 文件确实覆盖了此处指定的一些默认值。
变量 |
描述 |
默认值 |
|---|---|---|
PORT |
SDR REST API 服务器的端口 |
4000 |
WDM_WL_SPEC |
SDR 在崩溃/重启时使用的本地缓存文件 |
“./tests/data_wl.yaml” |
WDM_CLUSTER_CONFIG_FILE |
每个 DeepStream 管道的 IP/端口值 |
“docker_cluster_config.json” |
WDM_MSG_KEY |
SDR 应侦听的 Redis 键 |
“vst.event” |
WDM_WL_REDIS_MSG_FIELD |
Redis JSON 中要解析的键 |
“sensor.id” |
WDM_WL_ADD_URL |
服务添加端点 |
“/api/v1/stream/add” |
WDM_WL_DELETE_URL |
服务删除端点 |
“/api/v1/stream/remove” |
WDM_WL_HEALTH_CHECK_URL |
服务健康检查端点 |
“/api/v1/stream/add” |
WDM_WL_CHANGE_ID_ADD |
在 Redis 上侦听的 “change” 类型,以了解何时向 DeepStream 添加流 |
“camera_streaming” |
WDM_PRELOAD_WORKLOAD |
配置文件,其中包含启动时应自动加载的流(除了 VST 上已有的流) |
“./event_pre-roll.json” |
WDM_CLEAR_DATA_WL |
如果应在启动时清除本地缓存,则为 True |
False |
WDM_KFK_ENABLE |
如果应启用 Kafka,则为 True |
True |
WDM_DS_SWAP_ID_NAME |
如果应在添加到 DeepStream 之前从 VST Redis 消息中交换 ID 和名称,则为 True |
False |
WDM_VALIDATE_BEFORE_ADD |
如果应在发送到 DeepStream 之前验证添加 JSON(即,确保设置了名称、ID 和 URL),则为 True |
False |
WDM_PRELOAD_DELAY_FOR_DS_API |
如果 SDR 应等待服务健康检查通过后再开始添加流,则为 True |
False |
WDM_WL_THRESHOLD |
SDR 应添加到每个管道的最大流数 |
8 |
WDM_CLUSTER_TYPE |
正在使用的集群类型 |
“docker” |
WDM_POD_WATCH_DOCKER_DELAY |
SDR 应多久(秒)检查容器重启并更新流分配 |
0.05 |
WDM_DS_STATUS_CHECK |
如果应读取 DeepStream 返回状态代码而不是忽略,则为 True |
False |
WDM_RESTART_DS_ON_ADD_FAIL |
如果在多次添加/删除事件失败时应重启 DeepStream,则为 True |
False |
WDM_DISABLE_WERKZEUG_LOGGING |
如果应禁用 Werkzeug 日志记录以减少总体日志记录,则为 True |
False |
WDM_WL_OBJECT_NAME |
发送到 Redis 的 SDR 事件的工作负载对象名称,并且在同一系统上运行的 SDR 实例中必须是唯一的 |
“testapp” |
WDM_CONSUMER_GRP_ID |
Redis 消费者组 ID,并且在同一系统上运行的 SDR 实例中必须是唯一的 |
“consumer-grp-id-3” |
WDM_CLUSTER_CONTAINER_NAMES |
要监视重启/崩溃以进行 SDR 恢复机制的容器名称 |
“["sdr", "deepstream", "vst"]” |
docker_cluster_config.json 文件指定了 SDR 可以向其发送流的可用 DeepStream 管道的详细信息。此文件由 WDM_CLUSTER_CONFIG_FILE 环境变量指向,并且必须采用以下格式
{ "moj-ds-01": { "provisioning_address": "localhost:9010", "process_type": "docker" }, "moj-ds-02": { "provisioning_address": "localhost:9011", "process_type": "docker" } }
其中
键的数量等于您要分配到的服务的总数。
所有键都必须是唯一的。
provisioning_address必须设置为每个服务的 IP/端口(即,对于 DeepStream,IP 是 localhost,但两个管道的端口不同)。
process_type如果使用 Docker Compose,则必须设置为 docker。
SDR 将按顺序填充每个服务。换句话说,SDR 将首先向 “moj-ds-01” 添加 WDM_WL_THRESHOLD 个源,然后再向 “moj-ds-02” 添加源。如果从 “moj-ds-01” 中删除一个源,则该位置将被下一个添加的源填充。
基于 PeopleNet 的推理#
DeepStream 模块使用 NVIDIA PeopleNet 2.6 版作为对象检测模型。预生成的引擎文件用于减少启动时间。引擎文件因使用的设备(Orin AGX、Orin NX16、Orin NX8、Orin Nano)以及批大小而异,因此 DeepStream 配置也因设备而异。使用 1 的跟踪距离,这意味着每隔一帧运行推理以限制推理利用率。混合聚类用于处理网络输出。
请注意,与 DeepStream 一起使用的 PeopleNet 2.6 引擎文件需要在 Jetpack 6.1 中与 TensorRT 在 DLA 上运行,由于 TensorRT 发行说明中记录的已知问题,需要离线生成,此处为了方便起见捕获如下
在为 DLA 构建 TensorRT 引擎时,存在一个已知问题,即“Layers Running on DLA”(在 TensorRT 的详细模式下可见)中列出的整个 DLA 子图无法构建/最终回退到 GPU,并显示消息“{ForeignNode[…]} cannot be compiled by DLA, falling back to GPU”。这已在两个基于 ResNet 的模型中观察到:来自 TAO 的 PeopleNet v2.6 和 TrafficCamNet。在这两种情况下,可以通过将 TensorRT 的默认 DLA SRAM 池大小从 1 MiB 更改为 0.5 MiB 来解决此问题。使用 trtexec,可以通过在构建 TensorRT 引擎时添加参数 --memPoolSize=dlaSRAM:0.5 来实现。
基于 YOLOv8s 的推理#
DeepStream 推理服务现在支持 YOLO (v8s) 模型,用于在 DLA 上进行对象检测。YOLO 是一种最先进的对象检测模型,支持低延迟和多类支持等多种功能。有关多年来发布的各种 YOLO 模型的更多背景信息,请参阅此链接:https://arxiv.org/abs/2304.00501
与 PeopleNet2.6 不同,YOLOv8s 使用传统的 test5 而不是 Service Maker 版本。由于此模型的自定义 DLA 支持版本存在已知问题,并且传统的 DeepStream test5 应用程序存在已知问题,因此默认情况下此模型仅支持一个流。有关如何使用此模型运行更多流的详细信息,请参阅下面的 增加 YOLOv8s 流计数。
基于 NvDCF 的跟踪器#
DeepStream 中使用的 NvDCF 跟踪器已配置为每隔一帧运行推理。NvDCF 特别适用于室内零售环境中的人员分析,这基于其视觉跟踪能力,使其能够抵抗完全或部分遮挡。有关正在使用的跟踪器配置,请参阅 DeepStream 配置文件中的 ll-config-file 变量定义。
Orin AGX、NX16 和 NX8 的默认配置通过 VPI 统一 API 使用 PVA 后端进行跟踪器,以便从 GPU 分担计算负载。子批处理也用于处理每个 PVA 实例的多个流。在 Orin AGX 上,CUDA 后端与 PVA 结合使用以处理某些流,因为支持的流计数很高。Orin Nano 没有 PVA 加速器,因此跟踪器计算在 GPU 上完成。
Redis#
来自 DeepStream 的检测事件由 MessageBroker 输出到 Redis test 流。可以使用以下命令查看最新的事件
sudo docker exec -it redis redis-cli
xinfo STREAM test
事件采用以下格式
"{\n \"version\" : \"4.0\",\n \"id\" : \"65704\",\n \"@timestamp\" : \"2024-04-25T21:56:43.715Z\",\n \"sensorId\" : \"MOJD7_2\",\n \"objects\" : [\n \"655|1364.74|230.769|1487.88|431.31|Person|-0.1|#||||||\",\n \"607|137.03|204.356|282.938|583.155|Person|-0.1|#||||||\"\n ]\n}"
这些消息包含有关最新处理的时间戳、sensorId 和对象检测的信息。然后,分析微服务将这些消息作为其输入消耗。有关更多信息,请查看 Redis 页面。
日志#
默认情况下,DeepStream 日志保存在 /data/logging-volume/deepstream.log 文件中。可以使用命令 tail -f /data/logging-volume/deepstream.log 查看实时日志。可以在此文件中查看 DeepStream 当前正在处理的流以及每个流的当前 fps 值。通常,使用默认配置选项时,这些值应在 30fps 左右,但如果输入流的 fps 值较低,则可能会更低。可以在下面看到 DeepStream 日志的示例片段
Active sources : 4 **PERF: FPS 3 (Avg) FPS 2 (Avg) FPS 1 (Avg) FPS 0 (Avg) Thu Apr 25 17:26:26 2024 **PERF: MOJD2_2mbps[e9ad9678-0506-4c3a-8621-9dc865bb1cb1] 30.03 (30.15) MOJD3[e728c793-cf9c-4b6c-b0c3-3565d001d9d9] 30.03 (30.86) MOJD2_5mbps[9dab9be9-b1b0-4892-b6b9-7f7adfe08bb7] 30.03 (30.40) MOJD6[555f23f8-4b8f-457d-8246-207af6e06263] 30.03 (30.92) Active sources : 0 Thu Apr 25 17:26:26 2024
它指定了每个管道的源数量、当前日期/时间、fps 值、流 ID 和流名称。第一个 fps 是当前 fps 值,而括号中的数字是该流的平均值。流名称在通过 VST 添加流时设置,而流 ID 由 VST 随机生成作为唯一标识符。
默认情况下,SDR 日志保存在 /data/logging-volume/sdr-deepstream.log 文件中。可以使用命令 tail -f /data/logging-volume/sdr-deepstream.log 查看实时日志。可以在此文件中查看通过 SDR 添加到 DeepStream 的当前流以及 SDR 通过 Redis 接收到的最新相关消息。
部署#
示例 DeepStream 配置文件和容器信息可以在 NGC 上找到,作为参考 AI-NVR 应用程序的一部分。PeopleNet2.6 配置可以在 ai_nvr/config/deepstream/pn26 下找到,而 YOLOv8s 配置可以在 ai_nvr/config/deepstream/yolov8s 下找到。提供了不同的 docker compose 配置,以便轻松开箱即用地使用 PeopleNet2.6 或 YOLOv8s。请记住,提供的 DeepStream 容器中默认仅包含 PeopleNet2.6 引擎和模型文件。在快速入门指南中提供了使用默认 PeopleNet2.6 模型部署示例 AI-NVR 参考应用程序的命令。在部署之前,请首先按照 快速入门指南 设置您的 Jetson 平台服务系统。
修改 DeepStream 配置#
您可以根据您的用例修改 DeepStream 配置。这可能包括更改批大小、更改跟踪器配置、更改 primary-gie 配置以修改使用的模型或硬件加速器、启用或禁用各种接收器(如显示输出或不同的消息代理)等。在修改这些配置时,请记住以下几点
如果更改 primary-gie 的批大小或配置,您可能还需要重命名(并可能生成)具有新批大小的新引擎文件。同样,您可能需要更改 docker compose yaml 配置中定义的 WDM_WL_THRESHOLD SDR 环境变量,以告知 SDR 应添加到给定 DeepStream 管道的最大流数。
在 DeepStream 管道的不同组件之间使用各种宽度/高度选项可能会导致严重的性能损失。不同组件之间使用不同的批大小也是如此。建议在 DeepStream 管道的每个部分保持这些同步。
SDR 使用 DeepStream nvmultiurisrcbin source-bin 来添加/删除流。分析使用 DeepStream Redis 输出,由 msgbroker sink 定义。在 Grafana 中监控 DeepStream FPS 报告使用输出到主机上的 /data/logging-volume/deepstream.log 的日志。如果修改了这些方面中的任何一个,则参考 AI-NVR 应用程序的其他一些组件可能无法按预期运行。
下面提供了两个参考模型的其他注意事项。
PeopleNet2.6 部署#
如果您决定修改示例配置,您可能需要重新生成引擎文件以支持您的新配置。如上面的 PeopleNet2.6 部分所述,由于已知问题,这可能需要使用 trtexec 命令手动完成。下面提供了一个示例命令,用于为 Orin AGX 生成 DLA0 批大小为 8 的配置文件
$ /usr/src/tensorrt/bin/trtexec --onnx=./resnet34_peoplenet_int8.onnx --calib=./PeopleNet_calib.cal --int8 --minShapes="input_1:0":8x3x544x960 --optShapes="input_1:0":8x3x544x960 --maxShapes="input_1:0":8x3x544x960 --duration=100 --useDLACore=0 --allowGPUFallback --memPoolSize=dlaSRAM:0.5 --verbose --saveEngine=./dla0_pn26_jp6_halfmem_bs8.engine
这可以从提供的 Jetson 平台服务 DeepStream 容器的 /pn26-files 目录中运行。这是必要的 PeopleNet2.6 依赖项(onnx 和 cal 文件)所在的位置。可以根据需要修改传递到 trtexec 的选项。
使用 AI-NVR 参考应用程序部署 PeopleNet2.6 的命令可以在快速入门指南的 运行 IVA 应用程序 部分找到。
YOLOv8s 部署#
注意
对于用户选择使用的每个数据集,用户有责任检查数据集许可证是否适合预期用途。
增加 YOLOv8s 流计数#
由于此模型的自定义 DLA 支持版本存在已知问题,并且传统的 DeepStream test5 应用程序存在已知问题,因此默认情况下此模型仅支持一个流。此 DLA 模型目前仅支持批大小为 1,但如果使用 nvmultiurisrcbin,DeepStream 应用程序会自动覆盖此批大小值。可以在提供的 DeepStream 容器和配置中进行以下更改,以支持使用此模型的更多流
启动 DeepStream triton 和 JPS 示例容器
$ sudo docker run -itd --runtime nvidia --network host --name ds-modifications-triton nvcr.io/nvidia/deepstream:7.1-triton-multiarch
$ sudo docker run -itd --runtime nvidia --network host --name ds-modifications nvcr.io/nvidia/jps/deepstream:7.1-public-v1
$ sudo docker exec -it ds-modifications-triton /bin/bash
修改 /opt/nvidia/deepstream/deepstream-7.1/sources/apps/sample_apps/deepstream-app/deepstream_app.c 文件。找到以下部分(从第 1327 行开始)并注释掉它
/** if using nvmultiurisrcbin, override batch-size config for sgie */
if (config->use_nvmultiurisrcbin) {
for (guint i = 0; i < config->num_secondary_gie_sub_bins; i++) {
config->secondary_gie_sub_bin_config[i].batch_size =
config->sgie_batch_size;
}
}
这将禁用 DeepStream 根据 nvmultiurisrcbin 的批大小值覆盖 PGIE 的批大小值。
之后,重新编译 DeepStream test5 应用程序
$ cd /opt/nvidia/deepstream/deepstream-7.1/sources/apps/sample_apps/deepstream-test5
$ export CUDA_VER=12.6
$ make
退出容器,将新的可执行文件复制到 JPS 容器,然后提交新容器以保存它
$ exit
$ sudo docker cp ds-modifications-triton:/opt/nvidia/deepstream/deepstream-7.1/sources/apps/sample_apps/deepstream-test5 .
$ sudo docker cp deepstream-test5 ds-modifications:/opt/nvidia/deepstream/deepstream-7.1/sources/apps/sample_apps
$ sudo docker commit ds-modifications jps-ds:yolo-modifications
$ sudo docker stop ds-modifications-triton ds-modifications
修改提供的 DeepStream YOLOv8s 配置以更新批大小。编辑 config/deepstream/yolov8s/yolov8s-ds-config_<DEVICE_TYPE>.txt 的 [source-list] 部分。在此处将 [max-batch-size] 更新为 8。
您还需要更新 Docker Compose 配置以指向修改后的容器和其中的 test5 可执行文件的更新版本。将 compose_<DEVICE TYPE>_yolov8s.yaml 的 deepstream 部分下的 image 行更改为
image: jps-ds:yolo-modifications
同样,将同一部分中的 command 行更改为
command: sh -c '/opt/nvidia/deepstream/deepstream-7.1/sources/apps/sample_apps/deepstream-test5/deepstream-test5-app -c /ds-config-files/yolov8s/yolov8s-ds-config_nx16.txt 2>&1 | grep --line-buffered . | tee -a /log/deepstream.log'
最后,还要增加 SDR 将分配给 DeepStream 的流的数量。更新此同一 yaml 文件中 sdr 下的 WDM_WL_THRESHOLD,并将其设置为 8。
您现在可以使用与以前相同的 Docker Compose up 命令启动带有 YOLOv8s 的 AI-NVR,并且能够支持更高的流计数。
使用 AI-NVR 参考应用程序运行 YOLOv8s#
提供了 Docker compose 配置,以便将其与 AI-NVR 堆栈的其余部分一起运行。要运行,请使用以下命令
Orin AGX: sudo docker compose -f compose_agx_yolov8s.yaml up -d --force-recreate
Orin NX16: sudo docker compose -f compose_nx16_yolov8s.yaml up -d --force-recreate
停止
Orin AGX: sudo docker compose -f compose_agx_yolov8s.yaml down --remove-orphans
Orin NX16: sudo docker compose -f compose_nx16_yolov8s.yaml down --remove-orphans