可分离卷积
概述
可分离卷积算法执行 2D 卷积操作,但利用了 2D 核是可分离的这一事实。用户传递一个水平和垂直 1D 核。这通常会带来更好的性能,特别是对于大于 5x5 的核。对于较小的核,最好直接使用带有 2D 核的 卷积 算法。
| 输入 | Sobel 核 | 输出 |
|---|---|---|
 | \begin{eqnarray*} k_{col} &=& \frac{1}{64} \begin{bmatrix} 1 \\ 6 \\ 15 \\ 20 \\ 15 \\ 6 \\ 1 \end{bmatrix} \\ k_{row} &=& \begin{bmatrix} -1 & -5 & -6 & 0 & 6 & 5 & 1 \end{bmatrix} \end{eqnarray*} | 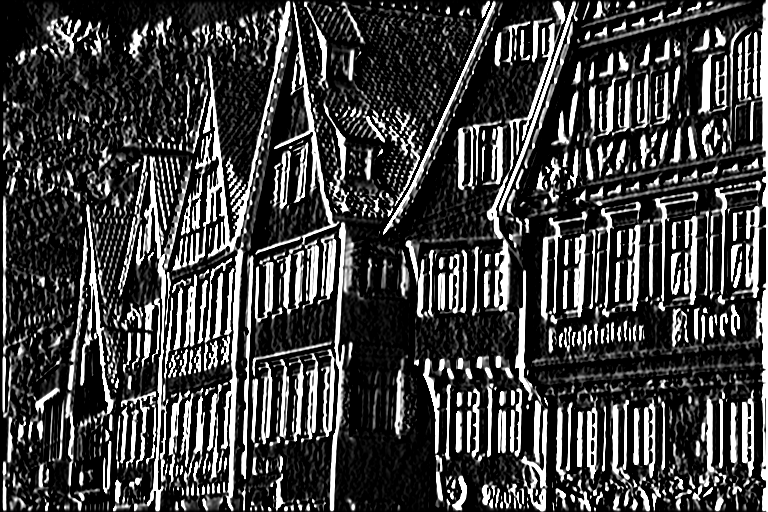 |
实现
离散 2D 卷积使用以下离散函数实现
\begin{eqnarray*} I'[x,y] &=& \sum_{m=0}^{k_w} K_{row}[m] \times I[x,y-(m - \lfloor k_w/2 \rfloor)] \\ I''[x,y] &=& \sum_{m=0}^{k_h} K_{col}[m] \times I'[x-(m - \lfloor k_h/2 \rfloor),y] \end{eqnarray*}
其中
- \(I\) 是输入图像。
- \(I'\) 是沿行卷积的临时图像。
- \(I''\) 是最终结果。
- \(K_{row}\) 是行卷积核。
- \(K_{col}\) 是列卷积核。
- \(k_w,k_h\) 分别是核的宽度和高度。
- 注意
- 大多数计算机视觉库期望在调用其卷积函数之前反转核。VPI 则不然,我们实现的是实际的卷积,而不是互相关。当然,如果核是对称的,则这无关紧要。
C API 函数
有关实现该算法的限制、约束和后端列表,请查阅以下函数的参考文档
| 函数 | 描述 |
|---|---|
| vpiSubmitSeparableConvolution | 对图像运行通用的 2D 卷积操作,针对可分离核进行了优化。 |
用法
语言- 导入 VPI 模块import vpi
- 定义一个 3x3 可分离 Sobel 核。sobel_row = [-1, -5, -6, 0, +6, +5, +1];sobel_col = [1/64.0, 6/64.0, 15/64.0, 20/64.0, 15/64.0, 6/64.0, 1/64.0]
- 使用 CPU 后端和给定的核,在输入图像上运行可分离卷积滤波器。输入和输出都是 VPI 图像。with vpi.Backend.CUDAoutput = input.convolution(kernel_x=sobel_row, kernel_y=sobel_col, border=vpi.Border.ZERO)
- 初始化阶段
- 包含定义所需函数和结构的头文件。#include <vpi/algo/Convolution.h>声明使用卷积核执行图像滤波的函数。
- 定义输入图像对象。VPIImage input = /*...*/;
- 创建输出图像。它从输入图像获取其尺寸和格式。int32_t w, h;vpiImageGetSize(input, &w, &h);VPIImageFormat type;vpiImageGetFormat(input, &type);VPIImage output;vpiImageCreate(w, h, type, 0, &output);VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)使用指定的标志创建空的图像实例。VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)以像素为单位获取图像尺寸。
- 创建将在其中提交算法以供执行的流。VPIStream stream;vpiStreamCreate(0, &stream);
- 包含定义所需函数和结构的头文件。
- 处理阶段
- 定义要使用的核。在本例中,一个简单的 7x7 Sobel 滤波器。float sobel_row[7] = {-1, -5, -6, 0, +6, +5, +1};float sobel_col[7] = {1/64.f, 6/64.f, 15/64.f, 20/64.f, 15/64.f, 6/64.f, 1/64.f};
- 将算法提交到流,传递 1D 核和剩余参数。它将由 CUDA 后端执行。vpiSubmitSeparableConvolution(stream, VPI_BACKEND_CUDA, input, output, sobel_row, 7, sobel_col, 7, VPI_BORDER_ZERO);VPIStatus vpiSubmitSeparableConvolution(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, const float *kernelXData, int32_t kernelXSize, const float *kernelYData, int32_t kernelYSize, VPIBorderExtension border)对图像运行通用的 2D 卷积操作,针对可分离核进行了优化。
- (可选)等待直到处理完成。vpiStreamSync(stream);
- 定义要使用的核。在本例中,一个简单的 7x7 Sobel 滤波器。
- 清理阶段
- 释放流以及输入和输出图像所持有的资源。
有关更多信息,请参见 VPI - 视觉编程接口 “C API 参考”部分中的 卷积。
性能
有关如何使用以下性能表格的信息,请参见 算法性能表格。
在比较测量结果之前,请查阅 比较算法运行时间。
有关性能基准测试方式的更多信息,请参见 性能基准。