AlgoFlags.h 文件参考
用于处理 VPI 图像的函数和结构。 更多...
#include "Export.h"#include "ImageFormat.h"#include "PixelType.h"#include "Status.h"#include "Types.h"#include <stdint.h> AlgoFlags.h 的包含依赖关系图
AlgoFlags.h 的包含依赖关系图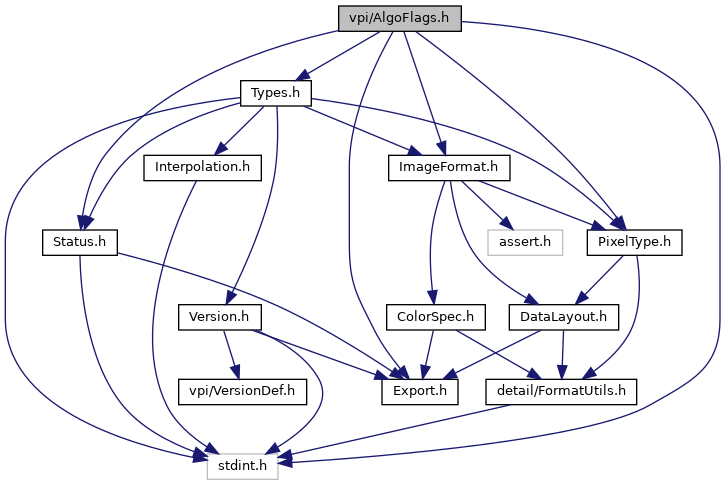 此图显示哪些文件直接或间接包含此文件
此图显示哪些文件直接或间接包含此文件
宏 | |
| #define | VPI_ACCUMULATE_OUTPUT (1u << 3) |
| 累加输出中的计数。 更多... | |
| #define | VPI_SAMPLING_ALIGNED_TO_CORNER (1u << 5) |
| 通知算法对齐到角点的像素进行采样,即 更多... | |
| #define | VPI_RELATIVE_MAP (1u << 6) |
| 通知算法考虑相对坐标。 更多... | |
| #define | VPI_NORMALIZED_MAP (1u << 7) |
| 通知算法考虑归一化坐标。 更多... | |
| #define | VPI_WARP_INVERSE (1u << 0) |
| 通知 warp/map 操作中使用的矩阵已反转。 更多... | |
| #define | VPI_PRECISE (1u << 1) |
| 通知算法将选择精确的实现。 更多... | |
| #define | VPI_DENORMALIZED_OUTPUT (1u << 2) |
| 保持输出非归一化。 更多... | |
| #define | VPI_ENABLE_CROSS_CHECK (1U << 0) |
| 定义是否启用交叉检查。 更多... | |
详细描述
用于处理 VPI 图像的函数和结构。
在文件 AlgoFlags.h 中定义。
宏定义文档
◆ VPI_WARP_INVERSE
| #define VPI_WARP_INVERSE (1u << 0) |
通知 warp/map 操作中使用的矩阵已反转。
如果用户已经反转了变换矩阵,设置此标志允许 warp 操作直接使用它,而不是在处理前自行反转。当矩阵求逆可能导致较大的数值误差时,例如当其行列式接近于零时,这尤其有用。
定义于文件 80 行 AlgoFlags.h。
◆ VPI_PRECISE
| #define VPI_PRECISE (1u << 1) |
◆ VPI_DENORMALIZED_OUTPUT
| #define VPI_DENORMALIZED_OUTPUT (1u << 2) |
保持输出非归一化。
此标志当前用于逆 FFT中,它表示输出将保持非归一化。这可以加快执行速度,因为通常不需要归一化。如果缺少此标志,则将缩放输出,并将其除以总像素数。这使得输出成为直接快速傅里叶变换的精确逆。
定义于文件 96 行 AlgoFlags.h。
◆ VPI_ENABLE_CROSS_CHECK
| #define VPI_ENABLE_CROSS_CHECK (1U << 0) |
定义是否启用交叉检查。
当启用交叉检查时,仅选择那些在两个方向上彼此最接近的查询和参考描述符对。意思是如果 A 的(查询描述符)最接近的参考描述符是 B,并且如果 B 的最接近的查询描述符是 A,则仅选择该对。
定义于文件 104 行 AlgoFlags.h。
◆ VPI_ACCUMULATE_OUTPUT
| #define VPI_ACCUMULATE_OUTPUT (1u << 3) |
◆ VPI_SAMPLING_ALIGNED_TO_CORNER
| #define VPI_SAMPLING_ALIGNED_TO_CORNER (1u << 5) |
◆ VPI_RELATIVE_MAP
| #define VPI_RELATIVE_MAP (1u << 6) |
通知算法考虑相对坐标。
例如,在 algo_dynamic_remap 中,相对映射意味着地图坐标是相对于输出坐标网格的偏移量。当未设置此标志时,则表示绝对映射,即相对于输出左上角的偏移量。请参考算法以获取更多详细信息。
定义于文件 123 行 AlgoFlags.h。
◆ VPI_NORMALIZED_MAP
| #define VPI_NORMALIZED_MAP (1u << 7) |
通知算法考虑归一化坐标。
例如,在 algo_dynamic_remap 中,归一化映射意味着坐标不依赖于输出尺寸。当未设置此标志时,则表示非归一化映射,即坐标表示输出域中的实际像素。请参考算法以获取更多详细信息。
定义于文件 131 行 AlgoFlags.h。