FFT
概述
FFT 应用程序输出输入图像的频谱表示,并将其保存到磁盘上的图像文件中。您可以定义用于处理的后端。
指令
命令行参数为
<后端> <输入图像>
其中
- 后端:cpu 或 cuda;它定义了将执行处理的后端。
- 输入图像:输入图像文件名;它接受 png、jpeg 以及可能的其他格式。
这是一个示例
- C++./vpi_sample_07_fft cuda ../assets/kodim08.png
- Pythonpython3 main.py cuda ../assets/kodim08.png
这是使用 CUDA 后端和提供的示例图像之一。您可以尝试其他图像,但需遵守算法施加的约束。
结果
| 输入图像 | 输出图像,频谱 |
|---|---|
 | 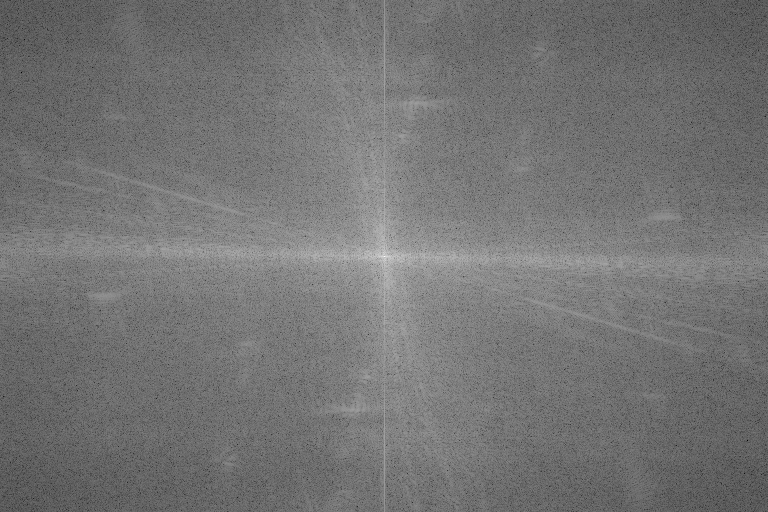 |
源代码
为方便起见,以下代码也安装在示例目录中。
语言 109 throw std::runtime_error("Backend '" + strBackend + "' not recognized, it must be either cpu or cuda.");
138 CHECK_STATUS(vpiImageCreate(cvImage.cols / 2 + 1, cvImage.rows, VPI_IMAGE_FORMAT_2F32, 0, &spectrum));
142 vpiCreateFFT(backend, cvImage.cols, cvImage.rows, VPI_IMAGE_FORMAT_F32, VPI_IMAGE_FORMAT_2F32, &fft));
161 CHECK_STATUS(vpiImageLockData(spectrum, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &outData));
169 cv::Mat cvSpectrum(outPitch.planes[0].height, outPitch.planes[0].width, CV_32FC2, outPitch.planes[0].data,
声明处理图像格式转换的函数。
声明实现快速傅里叶变换算法及其逆变换的函数。
用于处理 VPI 图像的函数和结构体。
用于处理 OpenCV 与 VPI 的互操作性的函数。
VPI 状态码处理函数的声明。
声明处理 VPI 流的函数。
VPIStatus vpiSubmitConvertImageFormat(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, const VPIConvertImageFormatParams *params)
将图像内容转换为所需的格式,可选择缩放和偏移。
VPIStatus vpiCreateFFT(uint64_t backends, int32_t inputWidth, int32_t inputHeight, const VPIImageFormat inFormat, const VPIImageFormat outFormat, VPIPayload *payload)
为直接快速傅里叶变换算法创建负载。
VPIStatus vpiSubmitFFT(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage input, VPIImage output, uint64_t flags)
对单张图像运行直接快速傅里叶变换。
VPIImagePlanePitchLinear planes[VPI_MAX_PLANE_COUNT]
以 pitch-linear 布局存储的所有图像平面的数据。
Definition: Image.h:160
VPIStatus vpiImageLockData(VPIImage img, VPILockMode mode, VPIImageBufferType bufType, VPIImageData *data)
获取图像对象的锁并返回图像内容。
VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
使用指定的标志创建一个空的图像实例。
VPIStatus vpiImageCreateWrapperOpenCVMat(const cv::Mat &mat, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
使用给定的图像格式将 cv::Mat 封装到 VPIImage 中。
Definition: OpenCVInterop.hpp:117