最小值/最大值位置
概述
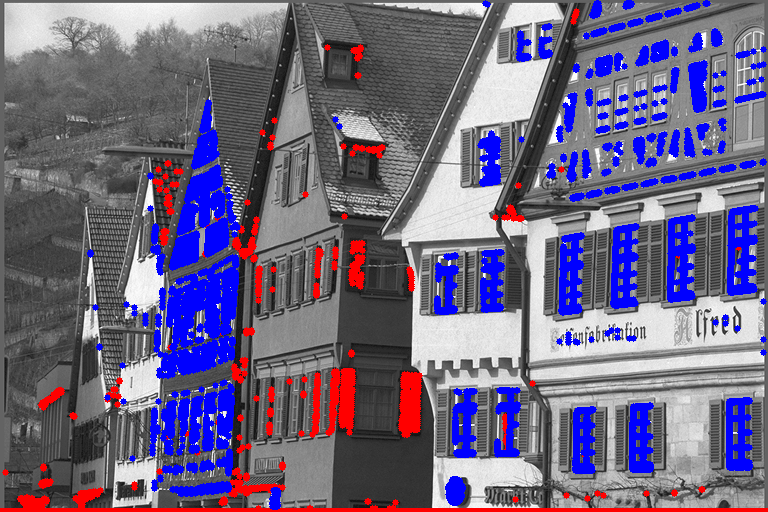
最小值/最大值位置算法对输入图像执行 2D 搜索操作。该算法查找像素的最小值和最大值,从而得到最小值和最大值的两组像素位置。这些位置是与全局最小值或最大值完全匹配的像素的 \((x,y)\) 坐标。此操作可用于定位图像上的峰值,无论是最高峰值、最低峰值还是两者兼有。
此示例显示了左侧的输入图像,以及右侧对应的最小值(蓝色)和最大值(红色)位置。
| 输入 | 输出 |
|---|---|
 |  |
实现
该算法在输入图像中搜索最小值和最大值。每个与最小值匹配的像素的位置都存储在输出数组中。最大值的操作在第二个输出数组中完成。可能会找到同一值的多个位置,无论是最小值还是最大值。
图像中的位置是一个关键点,其坐标为 \((x, y)\),分别对应于基于矩阵的坐标 \((j, i)\)。位置存储在用户提供的输出数组中,直到达到数组容量,该容量在数组创建时定义。最小值和最大值输出数组都这样做。每个数组返回的最大位置数可能不同,因为它们对应的容量可能不同。用户可以选择不提供输出数组(通过在参数中传递 NULL),在这种情况下,将不会搜索相应的位置。
C API 函数
有关实现该算法的限制、约束和后端的列表,请查阅以下函数的参考文档
| 函数 | 描述 |
|---|---|
| vpiCreateMinMaxLoc | 为 vpiSubmitMinMaxLoc 创建有效载荷。 |
| vpiSubmitMinMaxLoc | 在图像中查找最小值和最大值位置。 |
用法
语言- 导入 VPI 模块import vpi
- 使用 CPU 后端在输入图像上运行 MinMaxLoc 搜索。输入是 VPI 图像。with vpi.Backend.CPUmin_coords, max_coords = input.minmaxloc(min_capacity=10000, max_capacity=10000)
- (可选)检索最小值和最大值。
- 锁定输入图像和最小值/最大值输出数组,以高效访问其内容。with input.rlock_cpu() as in_data, min_coords.rlock_cpu() as min_data, max_coords.rlock_cpu() as max_data
- 检索具有最小值和最大值的第一个像素的坐标。 (x,y) 坐标被交换为 (y,x) 并转换为元组,适用于 2D numpy 数组索引。min_loc = tuple(min_data[0].astype(int)[::-1])max_loc = tuple(max_data[0].astype(int)[::-1])
- 使用这些坐标中的第一个来检索最小值/最大值像素值。min_value = in_data[min_loc]max_value = in_data[max_loc]
- 锁定输入图像和最小值/最大值输出数组,以高效访问其内容。
- 初始化阶段
- 包含定义所需函数的头文件。#include <vpi/algo/MinMaxLoc.h>声明在图像中执行最小值和最大值位置查找的函数。
- 定义输入图像对象。VPIImage input = /*...*/;
- 创建将包含处理所需的所有临时缓冲区的有效载荷。有效载荷创建需要输入的尺寸和格式。VPIImageFormat format;vpiImageGetFormat(input, &format);int width, height;vpiImageGetSize(input, &width, &height);VPIPayload payload;vpiCreateMinMaxLoc(VPI_BACKEND_CPU, width, height, format, &payload);VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)获取图像尺寸(以像素为单位)。VPIStatus vpiCreateMinMaxLoc(uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat imageFormat, VPIPayload *payload)为 vpiSubmitMinMaxLoc 创建有效载荷。
- 创建用于存储最小值和最大值坐标的输出数组。在此示例中,它们的容量设置为 10,000,这限制了要查找的位置数量。VPIArray minCoords;vpiArrayCreate(10000, VPI_ARRAY_TYPE_KEYPOINT_F32, 0, &minCoords);VPIArray maxCoords;vpiArrayCreate(10000, VPI_ARRAY_TYPE_KEYPOINT_F32, 0, &maxCoords);VPIStatus vpiArrayCreate(int32_t capacity, VPIArrayType type, uint64_t flags, VPIArray *array)创建一个空数组实例。
- 创建将在其中提交算法以供执行的流。VPIStream stream;vpiStreamCreate(0, &stream);
- 包含定义所需函数的头文件。
- 处理阶段
- 将算法提交到流,传递输入图像和输出数组。在此示例中,它将由 CPU 后端执行。vpiSubmitMinMaxLoc(stream, VPI_BACKEND_CPU, payload, input, minCoords, maxCoords);VPIStatus vpiSubmitMinMaxLoc(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage input, VPIArray minCoords, VPIArray maxCoords)在图像中查找最小值和最大值位置。
- (可选)检索最小值和最大值。
- 同步流以确保操作完成vpiStreamSync(stream);
- 锁定输入图像和最小值/最大值输出数组。VPIImageData inputImageData;VPIArrayData minCoordsData, maxCoordsData;VPIStatus vpiArrayLockData(VPIArray array, VPILockMode mode, VPIArrayBufferType bufType, VPIArrayData *data)获取数组对象的锁并返回数组内容。VPIStatus vpiImageLockData(VPIImage img, VPILockMode mode, VPIImageBufferType bufType, VPIImageData *data)获取图像对象的锁并返回图像内容。
- 检索找到的第一个最小值和最大值的坐标。
- 使用这些坐标作为输入图像内容的 2D 索引,以检索最小值/最大值像素值。这里假设输入图像格式为 VPI_IMAGE_FORMAT_U8。对于其他格式,必须采用不同的索引方法。// 假设输入图像是灰度图像(只有一个平面)。// 假设该平面具有 8 位无符号整数类型。typedef unsigned char Pixel;typedef unsigned char Byte;const Pixel *min_row = (const Pixel *)((const Byte *)imgData + min_i * imgPitchBytes);const Pixel *max_row = (const Pixel *)((const Byte *)imgData + max_i * imgPitchBytes);unsigned char min_value = min_row[min_j];unsigned char max_value = max_row[max_j];
- 由于不再需要图像和数组内容,因此必须解锁它们。
- 同步流以确保操作完成
- 将算法提交到流,传递输入图像和输出数组。在此示例中,它将由 CPU 后端执行。
- 清理阶段
- 释放流、有效载荷以及输入图像和输出数组所持有的资源。vpiStreamDestroy(stream);vpiPayloadDestroy(payload);vpiImageDestroy(input);vpiArrayDestroy(minCoords);vpiArrayDestroy(maxCoords);
- 释放流、有效载荷以及输入图像和输出数组所持有的资源。
有关更多信息,请参阅 VPI - 视觉编程接口 的 “C API 参考” 部分中的 MinMaxLoc。
性能
有关如何使用下表中的性能表的信息,请参阅算法性能表。
在比较测量结果之前,请查阅比较算法运行时间。
有关性能基准测试方式的更多信息,请参阅性能基准。