声明了实现立体视差估计算法的函数。 更多...
#include "../Export.h"#include "../ImageFormat.h"#include "../Status.h"#include "../Types.h"#include <stdint.h> StereoDisparity.h 的包含依赖关系图
StereoDisparity.h 的包含依赖关系图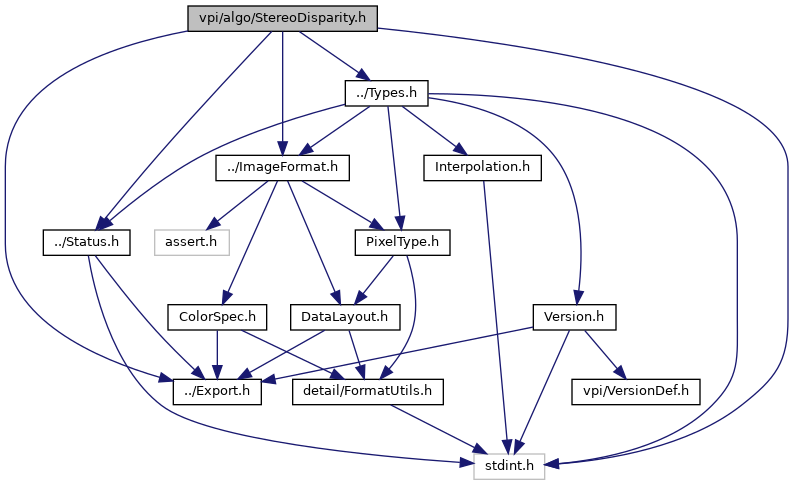
数据结构 | |
| struct | VPIStereoDisparityEstimatorCreationParams |
| 定义 vpiCreateStereoDisparityEstimator 参数的结构体。 更多... | |
| struct | VPIStereoDisparityEstimatorParams |
| 定义 vpiSubmitStereoDisparityEstimator 参数的结构体。 更多... | |
枚举 | |
| enum | VPIStereoDisparityConfidenceType |
| 定义置信度值的计算方式。 更多... | |
函数 | |
| VPIStatus | vpiInitStereoDisparityEstimatorCreationParams (VPIStereoDisparityEstimatorCreationParams *params) |
| 使用默认值初始化 VPIStereoDisparityEstimatorCreationParams。 更多... | |
| VPIStatus | vpiCreateStereoDisparityEstimator (uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat inputFormat, const VPIStereoDisparityEstimatorCreationParams *params, VPIPayload *payload) |
| 为 vpiSubmitStereoDisparityEstimator 创建有效负载。 更多... | |
| VPIStatus | vpiInitStereoDisparityEstimatorParams (VPIStereoDisparityEstimatorParams *params) |
| 使用默认值初始化 VPIStereoDisparityEstimatorParams。 更多... | |
| VPIStatus | vpiSubmitStereoDisparityEstimator (VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage left, VPIImage right, VPIImage disparity, VPIImage confidenceMap, const VPIStereoDisparityEstimatorParams *params) |
| 在一对图像上运行立体处理并输出视差图。 更多... | |
详细描述
声明了实现立体视差估计算法的函数。
文件 StereoDisparity.h 的定义。