01_video_encode (视频编码)
概述
video_encode 示例应用程序演示了如何编码 H.264/H.265/VP8/VP9 视频流。
该应用程序从文件中读取 YUV 输入缓冲区,执行视频编码,并将编码后的码流保存到基本的 .264、.265、vp8 或 vp9 文件中。
该应用程序在文件源模拟输入缓冲区上运行,因此不需要摄像头。
支持的视频格式有
- H.264
- H.265
- VP8
- VP9
支持的 YUV 格式有
构建和运行
前提条件
构建
- 输入
$ cd /usr/src/jetson_multimedia_api/samples/01_video_encode $ make
运行
- 输入
$ video_encode <in-file> <in-width> <in-height> <encoder-type> <out-file> [OPTIONS]
查看支持的选项
输入
$ ./video_encode --help
示例
$ ./video_encode ../../data/Video/sample_outdoor_car_1080p_10fps.yuv 1920 1080 H264 sample_outdoor_car_1080p_10fps.h264
流程
下图显示了此示例的流程。
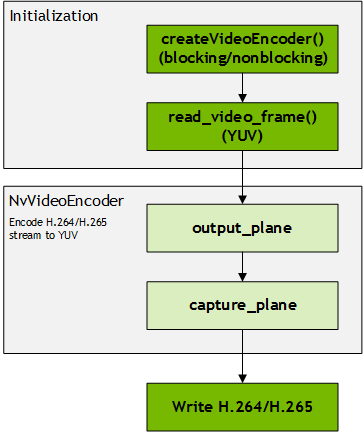
- 输出 平面 接收 YUV 帧格式的输入,并将其传递给 编码器 进行编码。
- 捕获 平面 以码流格式将编码后的帧传输到应用程序。
- 编码后的码流被写入文件。
- 对于输出 平面,应用程序支持 MMAP、DMABUF 和 USRPTR 内存类型。对于捕获 平面,它支持 MMAP 内存类型。
主要结构和类
该示例使用以下主要结构和类。
| 元素 | 描述 |
|---|---|
| NvVideoEncoder | 包含所有视频编码相关的元素和函数。 |
| Enc_pollthread | 指向编码捕获循环的线程处理程序的指针。 |
NvVideoEncoder 类封装了所有视频编码相关的元素和函数。示例中使用的主要成员有
| 成员 | 描述 |
|---|---|
| output_plane | 指定 V4L2 输出平面。 |
| capture_plane | 指定 V4L2 捕获平面。 |
| createVideoEncoder | 创建视频编码对象的静态函数。 |
| subscribeEvent | 订阅事件。 |
| setOutputPlaneFormat | 设置输出平面格式。 |
| setCapturePlaneFormat | 设置捕获平面格式。 |
| dqEvent | 出队 V4L2 设备报告的事件。 |
| isInError | 检查是否处于错误状态。 |
NvVideoEncoder 类包含两个关键元素:output_plane 和 capture_plane。这些对象派生自 NvV4l2ElementPlane 类类型。示例中使用以下主要成员
| 元素 | 描述 |
|---|---|
| setupPlane | 设置 V4L2 元素的平面。 |
| deinitPlane | 销毁 V4L2 元素的平面。 |
| setStreamStatus | 启动/停止流。 |
| setDQThreadCallback | 设置出队缓冲区线程的回调函数。 |
| startDQThread | 启动出队缓冲区的线程。 |
| stopDQThread | 停止出队缓冲区的线程。 |
| qBuffer | 将 V4L2 缓冲区入队。 |
| dqBuffer | 将 V4L2 缓冲区出队。 |
| getNumBuffers | 获取 V4L2 缓冲区的数量。 |
| getNumQueuedBuffers | 获取当前在平面上排队的缓冲区数量。 |